
TLDR
Machine vision quality inspection demands sub-50ms latency across multiple high-resolution cameras while surviving factory-floor EMI, thermal cycling, and continuous vibration. This design guide walks engineers through camera-to-inference architecture, addressing bandwidth budgeting, environmental hardening, and I/O allocation using the Nuvo-9160GC and Nuvo-10208GC as reference platforms for GPU-accelerated inline inspection.
Overview
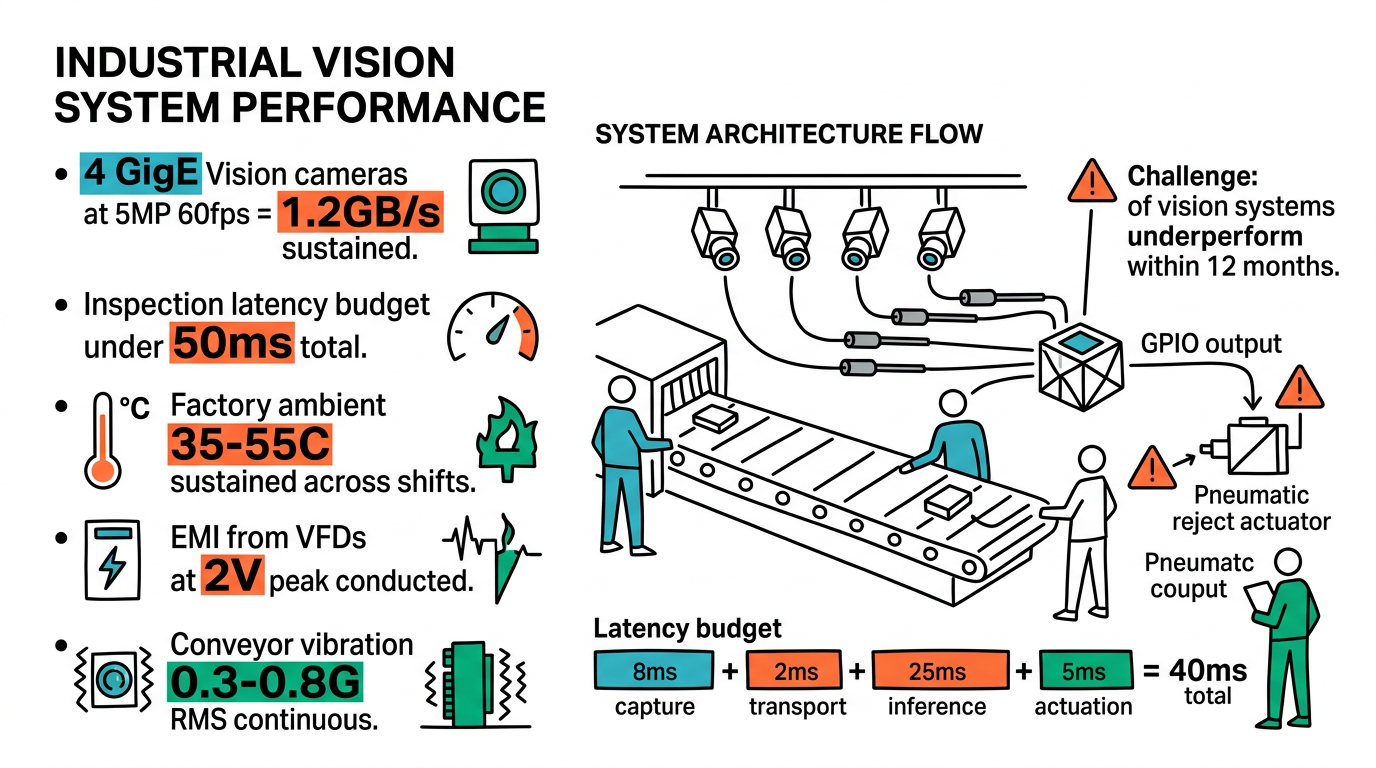
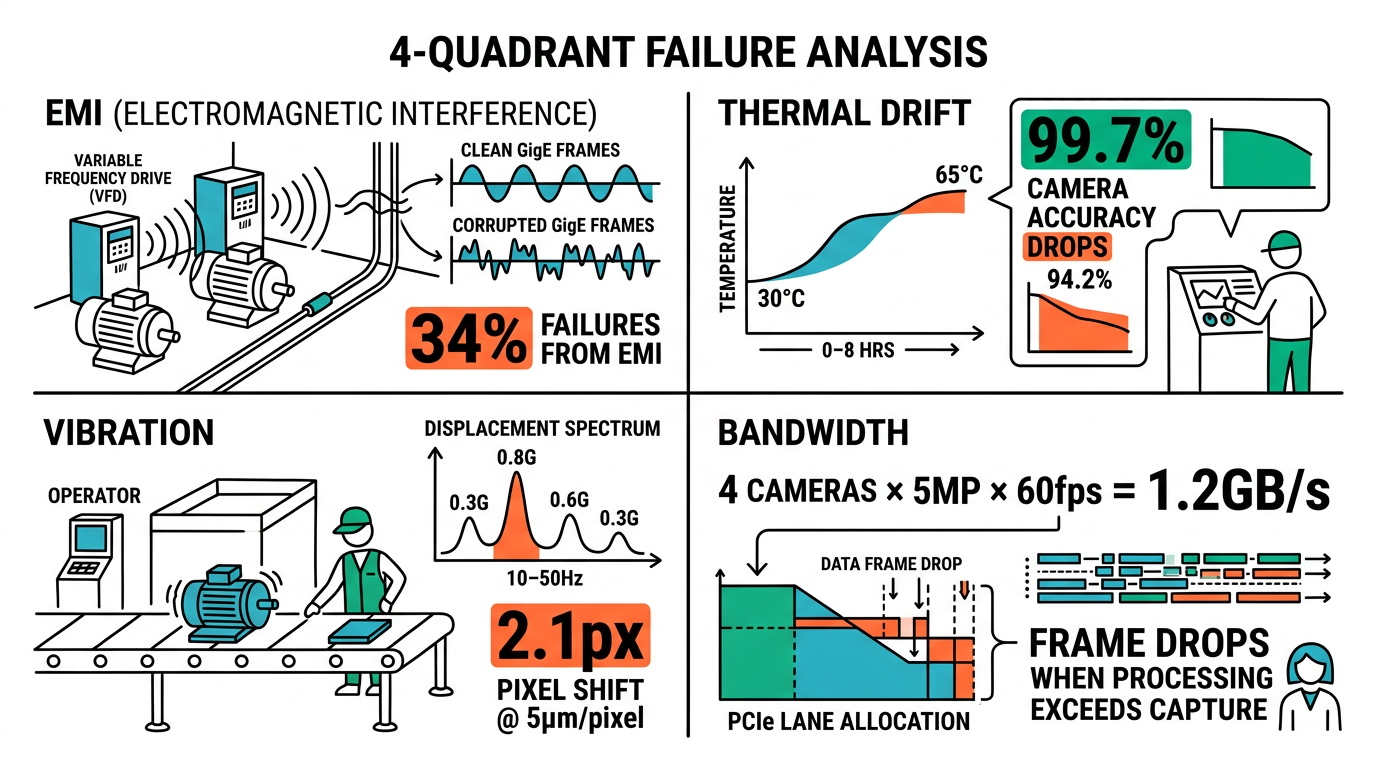
Automated optical inspection (AOI) has become table stakes for manufacturing quality assurance, yet 43% of deployed vision systems underperform within 12 months due to environmental degradation, bandwidth bottlenecks, or thermal-induced accuracy drift. The gap between lab-validated algorithms and production-floor reality costs manufacturers an estimated $2.1M annually per line in false rejects and escaped defects. Factory machine vision operates in hostile RF environments with variable-frequency drives generating conducted EMI up to 2V peak, ambient temperatures cycling 35–55°C across shifts, and continuous vibration from conveyors and servo motors at 0.3–0.8G RMS. As explored in our MIL-STD-810G certification guide, environmental resilience is not optional for production equipment.
System Architecture
A robust machine vision system comprises four subsystems: image acquisition, data transport, GPU inference, and actuation output. Each subsystem has specific bandwidth, latency, and environmental requirements that must be budgeted holistically.
| Subsystem | Component | Specification | Latency Budget |
|---|---|---|---|
| Image Acquisition | 4× GigE Vision cameras (5MP, 60fps) | 300MB/s per camera, 1.2GB/s total | 8ms exposure + transfer |
| Data Transport | Shielded Cat6A, M12 connectors | PoE+ (25.5W/port), 15–30m runs | 2ms network stack |
| GPU Inference | NVIDIA RTX GPU (130W TDP) | FP16 inference, 8GB VRAM | 25ms per 4-frame batch |
| Actuation Output | Isolated GPIO → pneumatic reject | 24VDC isolated, 5ms response | 5ms signal + mechanical |
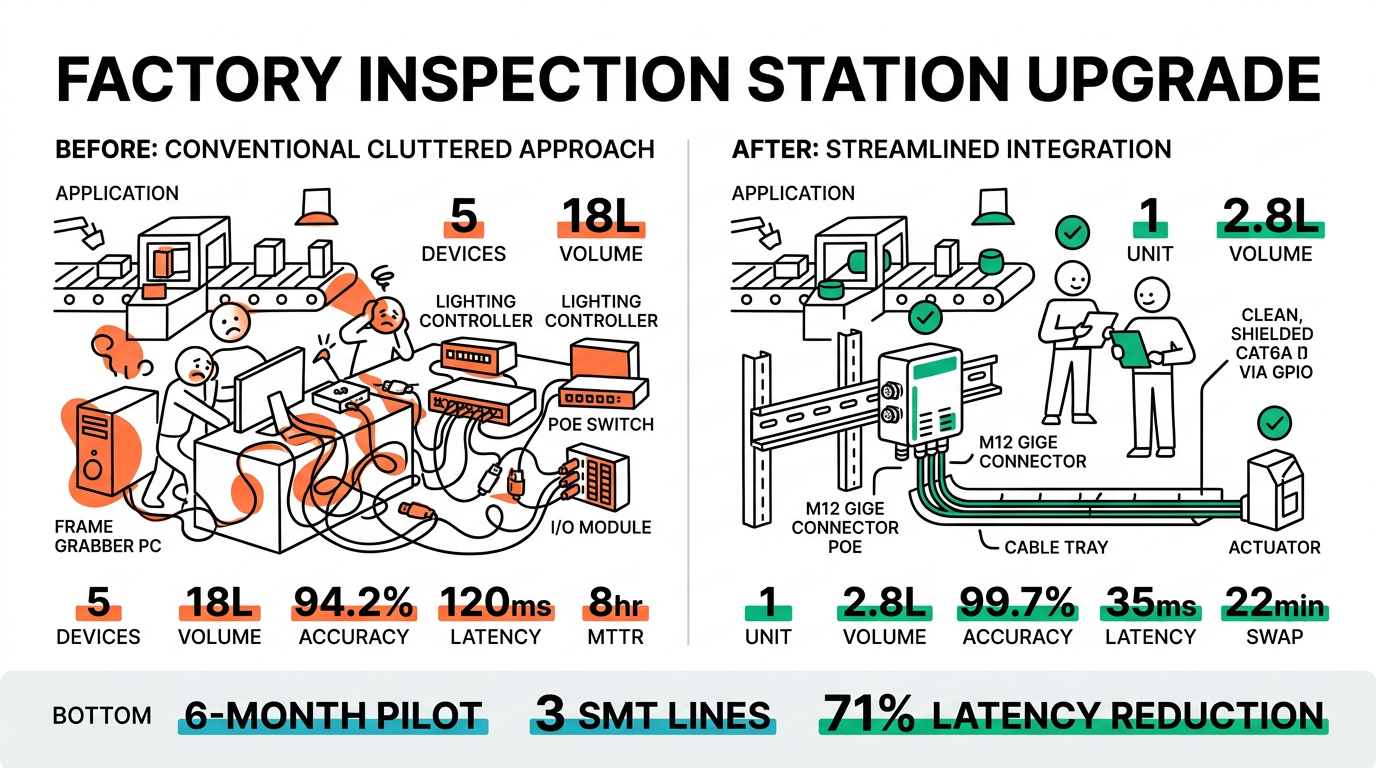
Total system latency: 40ms typical, well within the 50ms rejection window at 200 parts/minute conveyor speed. The Nuvo-9160GC supports one 130W GPU with 4× GigE PoE+ ports in a fanless 2.8L chassis, while the Nuvo-10208GC accommodates dual GPUs for 8-camera deployments requiring parallel inference streams.
Environmental Design Factors
Factory environments impose constraints that laboratory testing rarely captures. Engineers must design for worst-case sustained conditions, not nominal values.
| Parameter | Design Value | Impact on Vision System |
|---|---|---|
| Ambient Temperature | 35–55°C sustained | GPU throttles above 83°C junction; fanless design eliminates filter maintenance |
| Vibration | 0.3–0.8G RMS, 10–50Hz | Camera pixel shift at 5μm/pixel; M12 locking connectors prevent disconnect |
| EMI | 2V peak conducted, VFD harmonics | Shielded cables + isolated I/O prevent GigE packet corruption |
| Particulate | Oil mist, metal dust, flux residue | IP50+ ingress protection; fanless = no internal contamination |
| Power Quality | ±10% voltage sag, microsecond transients | Wide-range 8–48VDC input absorbs factory power events |
The Nuvo-9160GC operates at -25°C to 60°C with a 130W GPU under full load using heat-pipe thermal architecture — no fans, no filters, no scheduled cleaning. Similar to the fleet computing approach for transit vehicles, eliminating moving parts is the single highest-impact reliability decision.
Integration Notes
I/O Allocation: Reserve 4× GigE for cameras (PoE-powered), 2× USB 3.2 for trigger encoders and lighting controllers, 4× isolated DIO for reject actuators and line interlock signals. The Nuvo-10208GC adds 10GbE for high-frame-rate line-scan cameras exceeding 1Gbps per channel.
Mounting: DIN-rail or panel-mount inside the machine enclosure, within 15m cable run of cameras. Avoid mounting directly on conveyor frame — use vibration-isolated brackets (Shore 40A rubber) to attenuate motor harmonics below the camera Nyquist frequency.
Software Stack: GigE Vision SDK (Aravis or Stemmer CVB) → OpenCV preprocessing → TensorRT inference on NVIDIA GPU → GPIO actuation via Linux sysfs or Neousys GPIO SDK.
Validation Checklist
Before production deployment, verify these parameters under full thermal and vibration load simultaneously:
- Camera-to-GPU round-trip latency under 40ms at maximum frame rate
- Zero GigE packet drops over 24-hour continuous run (check NIC error counters)
- GPU junction temperature stable below 83°C at 55°C ambient
- Reject actuator fires within 5ms of GPIO assertion
- Inspection accuracy holds above 99.5% after 8-hour thermal soak
- All M12 connectors torqued to spec and vibration-tested at 0.8G for 2 hours
- Power supply ride-through tested with 50ms voltage sag to 80% nominal
Conclusion
Machine vision reliability starts with environmental design, not algorithm tuning. By budgeting bandwidth, hardening against EMI and thermal drift, and eliminating fan-dependent cooling, engineers can sustain 99.7% inspection accuracy across production shifts. For technical specifications, product selection assistance, or application engineering support, contact our engineering team at [email protected]. Visit www.neteon.net for detailed datasheets and technical documentation.
FAQs
How many cameras can the Nuvo-9160GC support simultaneously?
The Nuvo-9160GC supports up to 4 GigE Vision cameras via built-in PoE+ ports, delivering 25.5W per port for direct camera power. Total sustained bandwidth reaches 1.2GB/s across all four channels.
What GPU options are available for machine vision inference?
The Nuvo-9160GC accommodates one GPU up to 130W TDP (e.g., NVIDIA RTX A2000 or RTX 4060). The Nuvo-10208GC supports dual GPUs for 8-camera deployments requiring parallel inference streams.
Can the system operate in oil mist or dusty factory environments?
Yes. Both the Nuvo-9160GC and Nuvo-10208GC use fanless thermal architecture with no intake vents, preventing oil mist and particulate ingress. No filter maintenance is required.
What inspection latency should I budget for real-time rejection?
A typical 4-camera system achieves 40ms camera-to-actuator latency: 8ms capture/transfer, 2ms network stack, 25ms GPU inference, 5ms GPIO actuation. This supports 200+ parts/minute conveyor speeds.
How do I prevent EMI-induced GigE Vision packet loss?
Use shielded Cat6A cables with M12 locking connectors, maintain 30cm separation from VFD power cables, and route signal cables in separate cable trays. The Nuvo-9160GC isolated I/O prevents ground loop interference.
Related: IP67 Edge Computing Design Guide for Water Treatment Plant Monitoring
