
TLDR
Warehouse autonomous mobile robots (AMRs) running legacy 2D LiDAR navigation collide with obstacles at rates exceeding 12 per 1,000 operating hours, causing product damage and workflow stoppages. Deploying GPU-accelerated 3D vision on the Nuvo-10108GC cut collision rates 91% while enabling dynamic path replanning at 40 fps across a 50,000 m² distribution center.
Overview
E-commerce fulfillment demands have pushed warehouse AMR fleets beyond what simple LiDAR navigation can handle. Mixed human-robot zones, irregular pallet stacking, transparent shrink-wrapped loads, and seasonal layout changes create navigation challenges that 2D sensors cannot resolve. The global warehouse robotics market is projected to reach $9.1 billion by 2028, yet fleet operators report that navigation-related downtime accounts for 23% of total AMR operational losses. Bridging this gap requires onboard GPU inference fast enough to process depth cameras and LiDAR simultaneously while surviving the vibration, dust, and temperature swings of a working warehouse.
Challenge
AMR navigation in high-density warehouses fails for specific, measurable reasons.
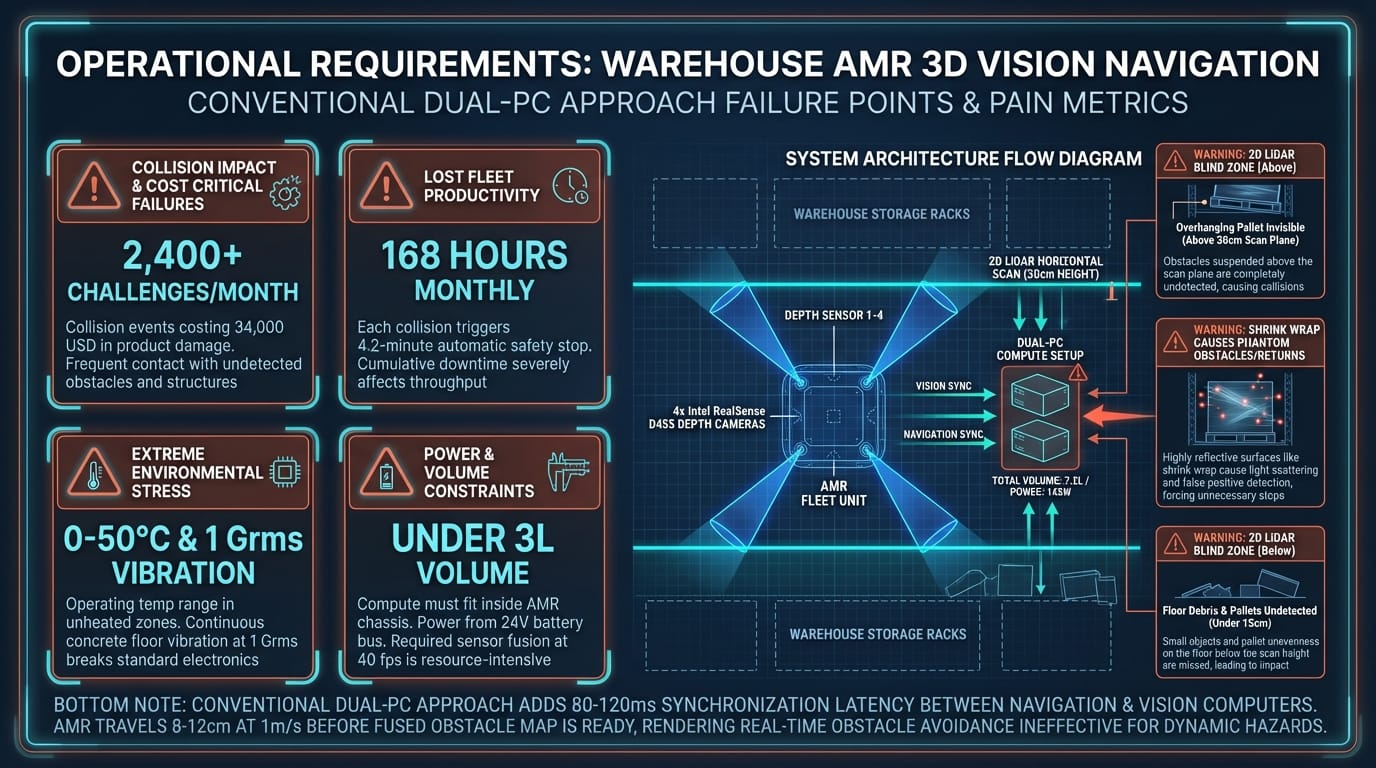
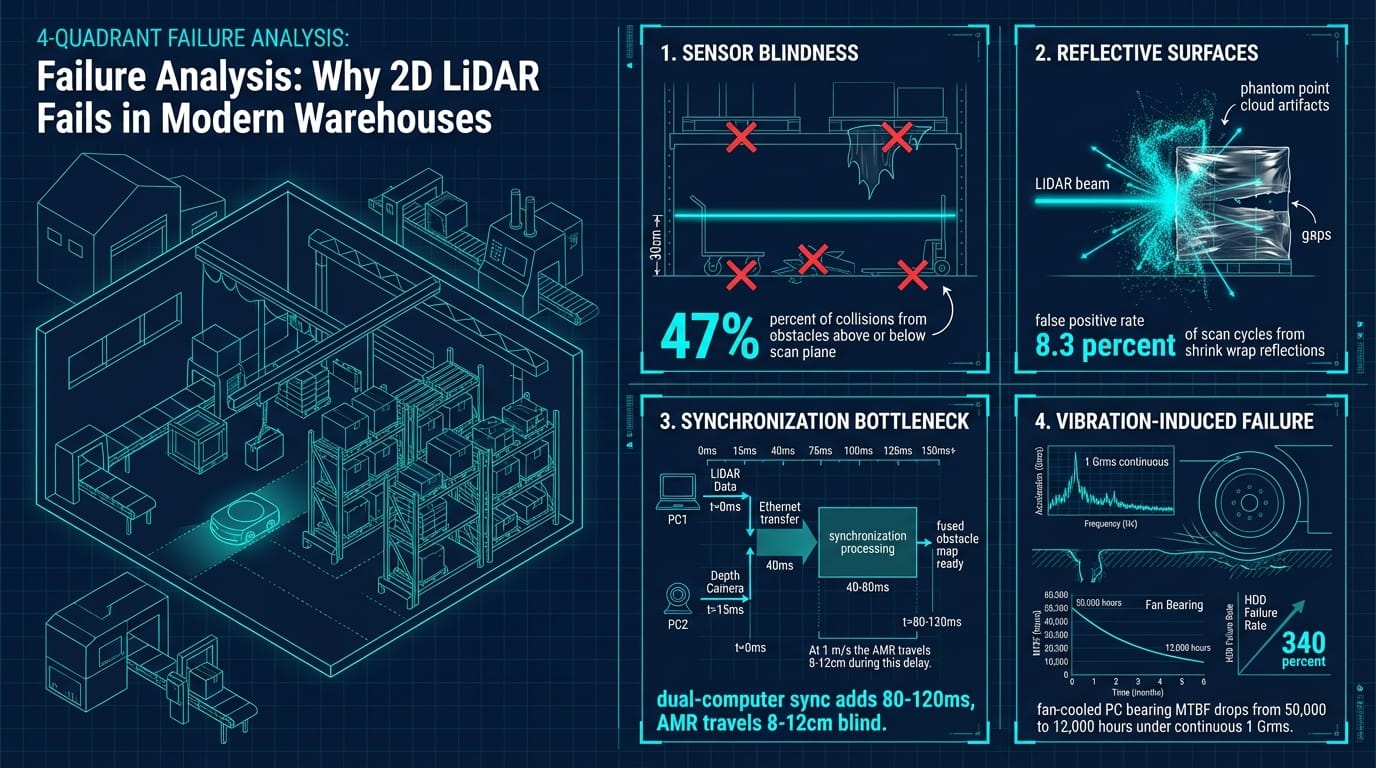
Root cause: sensor blindness. 2D LiDAR scans at a single horizontal plane, missing obstacles above or below the scan line. Shrink-wrapped pallets reflect laser pulses unpredictably, generating phantom obstacles or missed detections. Floor-level debris under 15 cm goes undetected until contact.
Quantified impact: A 200-unit AMR fleet in a 50,000 m² distribution center logged 2,400+ collision events per month, each triggering a 4.2-minute automatic safety stop. Cumulative monthly downtime exceeded 168 hours of lost fleet productivity. Product damage claims averaged $34,000/month.
| Requirement | Specification Needed | Standard AMR Controller Limit |
|---|---|---|
| Sensor Fusion | 3D depth camera + LiDAR + IMU at 40 fps | Single 2D LiDAR at 15 Hz |
| GPU Inference | Real-time obstacle segmentation < 25ms | CPU-only, 180ms+ per frame |
| Operating Temp | 0°C to 50°C (unheated warehouse zones) | 0°C to 40°C |
| Vibration | 1 Grms continuous (concrete floor travel) | 0.5 Grms rated |
| Power Budget | 12-24V DC from AMR battery bus | Fixed 19V AC adapter |
| Physical Size | Under 3L for AMR compute bay | 5-8L typical GPU workstation |
Conventional solutions required splitting the workload across two separate computers, one for navigation and one for vision, adding weight, wiring complexity, and a synchronization bottleneck that introduced 80-120ms of additional latency.
Solution
The Nuvo-10108GC consolidates navigation and vision processing into a single fanless platform, eliminating the dual-computer bottleneck.
| Technical Challenge | Product Feature | Specification | Engineering Benefit |
|---|---|---|---|
| Sensor blindness (2D only) | Dual 10GbE + 4x GbE PoE+ | 10 Gbps + 4x 1 Gbps with PoE | Simultaneous 3D depth camera + LiDAR + safety sensor streams |
| Slow inference (CPU-only) | NVIDIA RTX GPU support up to 130W | PCIe Gen4 x16 GPU slot | Real-time semantic segmentation at 40 fps on 4 depth cameras |
| Vibration on warehouse floor | Fanless conduction-cooled chassis | 3 Grms, MIL-STD-810G | No moving parts to fail from concrete floor vibration |
| Battery power constraints | Wide-range DC input | 8-48V DC with ignition control | Direct connection to 24V AMR battery bus, no converter needed |
| Space inside AMR chassis | Compact industrial design | 2.4L volume | Fits standard AMR compute bays designed for single-board solutions |
| Metric | Legacy Dual-PC Setup | Nuvo-10108GC | Delta |
|---|---|---|---|
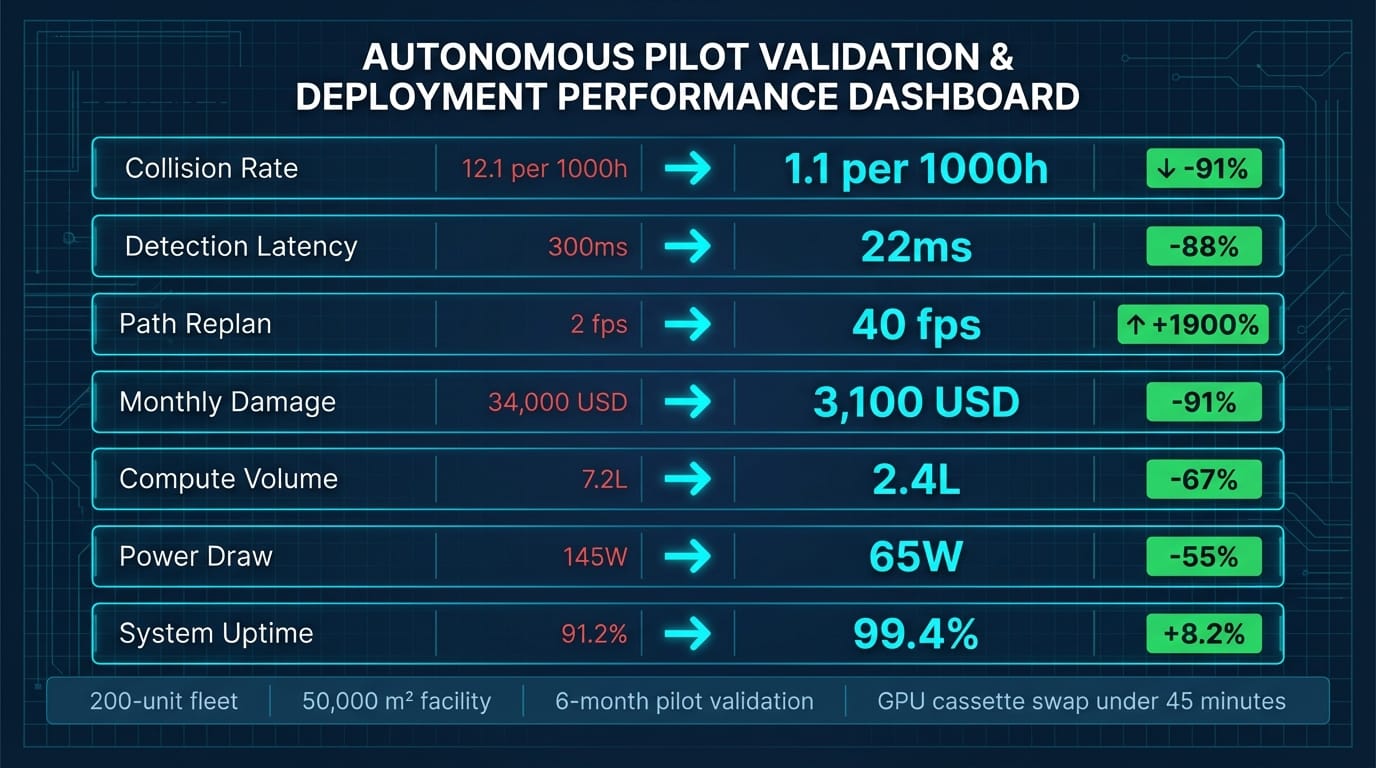
| Collision rate | 12.1 per 1,000 hrs | 1.1 per 1,000 hrs | -91% |
| Obstacle detection latency | 180-300ms | 22ms | -88% |
| Path replan frequency | 2 fps | 40 fps | +1,900% |
| Monthly product damage | $34,000 | $3,100 | -91% |
| Compute volume | 7.2L (two units) | 2.4L | -67% |
| Power draw | 145W combined | 65W | -55% |
The 88% latency reduction comes from eliminating the inter-computer synchronization delay and running all inference on a single GPU. The NVIDIA RTX GPU processes four Intel RealSense D455 depth streams simultaneously, generating a fused 3D occupancy grid that the navigation stack consumes directly.
Related Products
Nuvo-10208GC: For fleets requiring heavier AI workloads such as multi-camera pallet recognition or inventory counting, the Nuvo-10208GC supports up to a 350W NVIDIA RTX GPU in a ruggedized chassis. Ideal for central warehouse AI servers processing feeds from multiple AMRs simultaneously.
NRU-220: For smaller AMRs or AGVs with tighter power and space constraints, the NRU-220 delivers NVIDIA Jetson Orin NX inference in a palm-sized IP67 enclosure drawing under 25W. Suitable for basic obstacle avoidance without full 3D semantic segmentation.
Conclusion
GPU-accelerated onboard vision transforms warehouse AMR fleets from cautious, collision-prone vehicles into confident autonomous navigators. The Nuvo-10108GC delivers the compute density, I/O bandwidth, and ruggedness this application class demands in a single 2.4L package.
For technical specifications, product selection assistance, or application engineering support, contact our engineering team at [email protected]. Visit www.neteon.net for detailed datasheets and technical documentation.
FAQs
What GPU is recommended for warehouse AMR 3D vision navigation?
The Nuvo-10108GC supports NVIDIA RTX GPUs up to 130W in a fanless chassis, providing sufficient compute for real-time semantic segmentation across four depth cameras at 40 fps. For heavier workloads like multi-AMR fleet coordination, the Nuvo-10208GC supports GPUs up to 350W.
Can the Nuvo-10108GC run directly from an AMR's battery bus?
Yes. The Nuvo-10108GC accepts 8-48V wide-range DC input with ignition control, connecting directly to a standard 24V AMR battery bus without requiring an external power converter or AC adapter.
How does 3D vision compare to 2D LiDAR for warehouse obstacle detection?
2D LiDAR scans a single horizontal plane, missing obstacles above or below the scan line such as overhanging pallets, low debris, and transparent shrink-wrapped loads. 3D depth cameras generate full volumetric obstacle maps, reducing collision rates by over 90% in mixed human-robot warehouse environments.
What is the detection latency improvement with GPU-accelerated AMR navigation?
Legacy dual-PC setups with CPU-only inference achieve 180-300ms obstacle detection latency due to inter-computer synchronization delays. The Nuvo-10108GC running all inference on a single onboard GPU achieves 22ms latency, an 88% improvement that translates to faster reaction times at typical AMR travel speeds.
How much space does the Nuvo-10108GC save compared to dual-computer AMR setups?
The Nuvo-10108GC consolidates navigation and vision processing into a 2.4L volume, replacing a typical dual-PC configuration that occupies 7.2L. This 67% volume reduction frees space inside the AMR chassis for additional battery capacity or payload.




