
The Mining Industry's AI Inflection Point
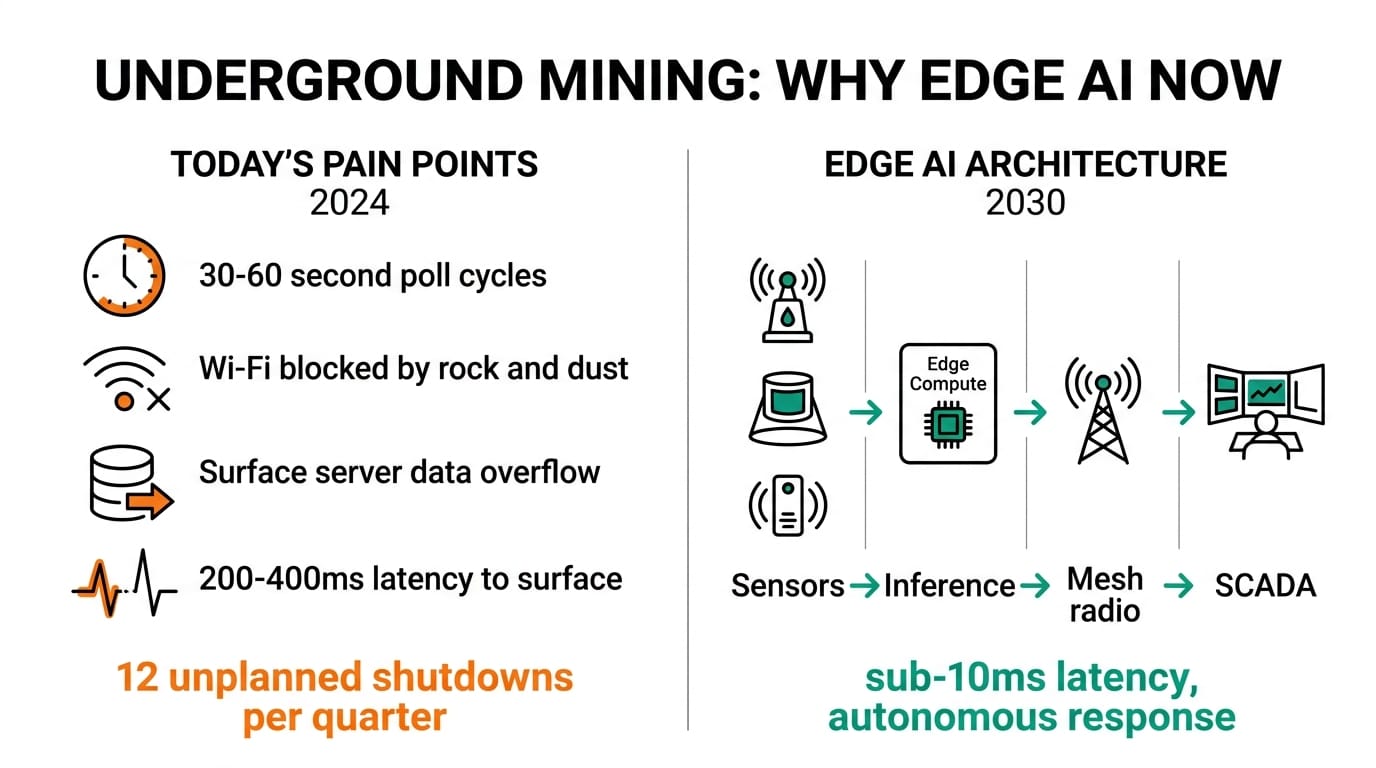
Underground mining operations generate massive sensor streams — from LiDAR-equipped haul trucks to vibration monitors embedded in tunnel walls. Until recently, most of that data traveled to surface-level servers or cloud platforms for analysis, introducing latency that made real-time decision-making impossible hundreds of meters below ground. For platform-level selection across vibration, ingress, temperature, and AI compute density, see our edge AI buyer’s guide for underground mining.
That model is changing fast. By 2026, early adopters are deploying GPU-accelerated edge computers directly at the rock face, inside ventilation shafts, and on autonomous drilling rigs. The shift isn't driven by curiosity — it's driven by regulation, economics, and a global push toward zero-harm mining.
Three Forces Reshaping Mining Compute
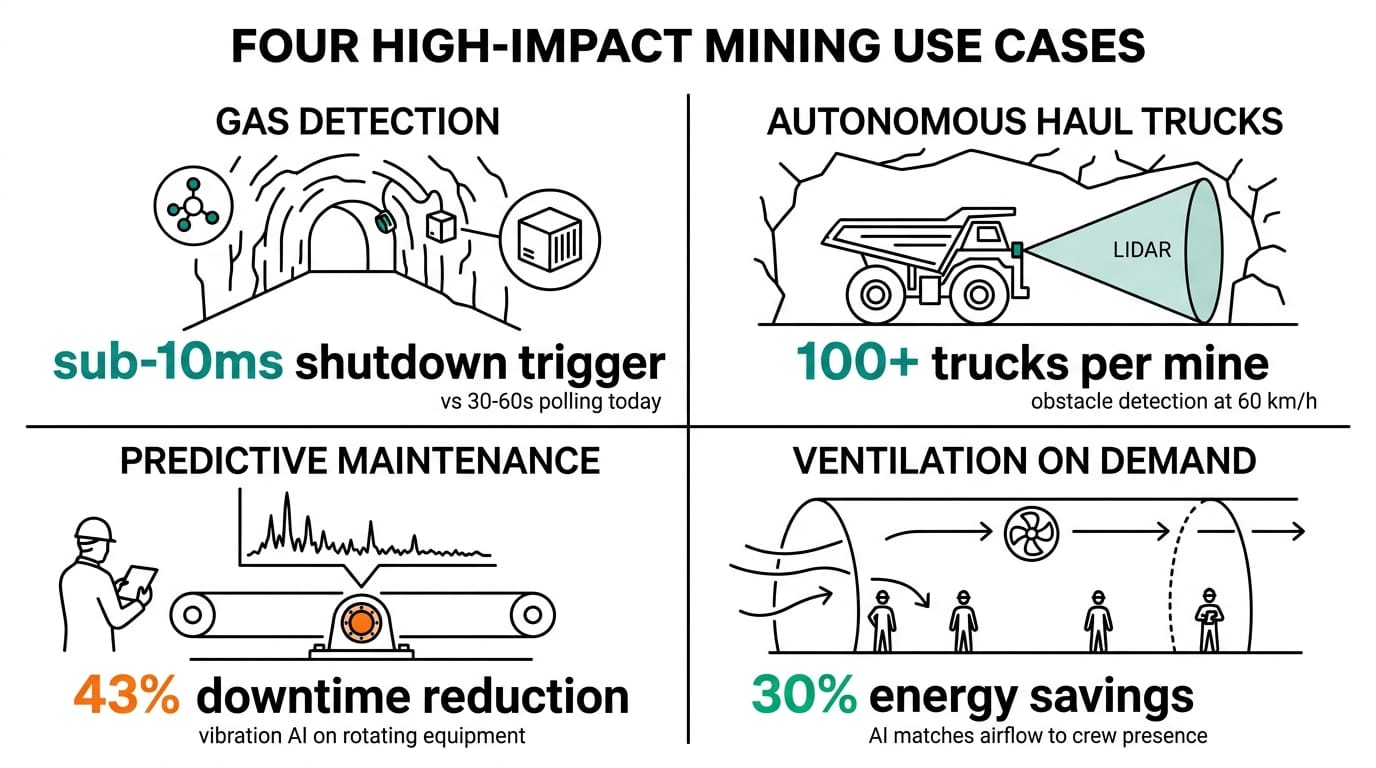
Regulatory pressure on safety. Updated ISO 19296 and IEC 80079-36 standards now mandate real-time atmospheric monitoring in confined underground spaces. Legacy poll-and-report cycles of 30–60 seconds are no longer compliant in several jurisdictions. Edge inference running gas-detection models at sub-second intervals satisfies both the regulatory threshold and the operational need for immediate evacuation alerts.
Autonomous haulage economics. The autonomous haul truck market is projected to reach $5.8 billion by 2029. Each vehicle relies on sensor fusion — combining LiDAR, radar, and camera feeds — to navigate GPS-denied underground routes. Processing this data on-vehicle with ruggedized GPU computers eliminates the dependency on fragile Wi-Fi mesh networks that degrade rapidly in dusty, vibration-heavy environments.
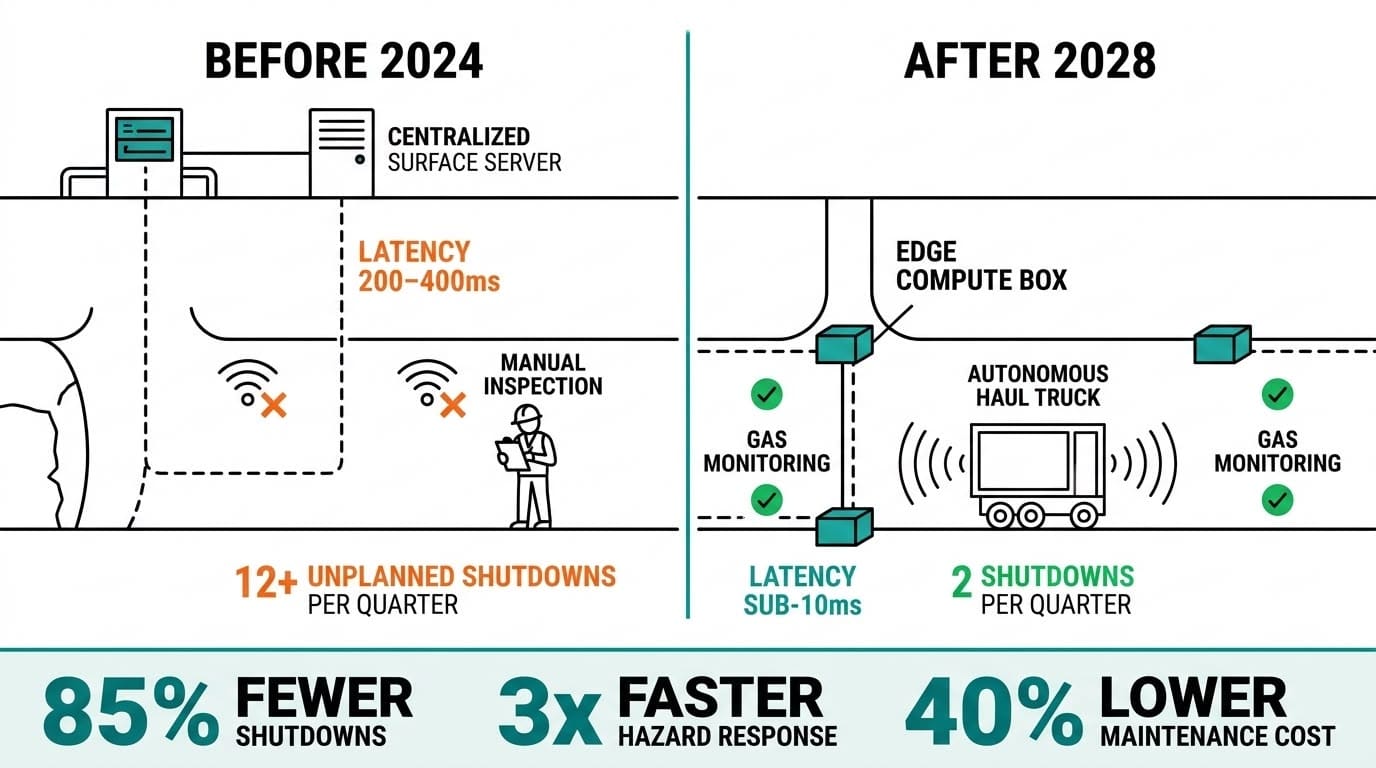
Predictive maintenance at depth. Conveyor belts, crushers, and ventilation fans accumulate operating data that predicts failure 48–72 hours before breakdown. Running inference at the equipment itself avoids the 200–400 ms round-trip latency of surface-based processing, enabling real-time anomaly detection that catches bearing wear, belt misalignment, and motor overheating before they trigger unplanned shutdowns.
What the 2026–2030 Roadmap Looks Like
Phase 1 (2026–2027): Safety-first deployments. Mines are installing edge AI nodes at ventilation junctions and refuge chambers for gas detection, dust monitoring, and personnel tracking. These are compliance-driven and carry the shortest payback period — typically under 12 months.
Phase 2 (2027–2028): Autonomous vehicle expansion. As proven autonomous haul truck fleets grow from pilot corridors to full-mine coverage, the compute requirement shifts from a handful of edge nodes to dozens per site. Each truck, loader, and drill rig needs its own GPU-capable computer rated for shock up to 50G, operating temperatures from -25°C to 70°C, and power input tolerant of 8–48 VDC fluctuations during engine start.
Phase 3 (2029–2030): Digital twin integration. The final stage connects underground edge nodes to surface-level digital twin platforms, enabling mine planners to simulate extraction sequences, ventilation changes, and equipment routing in near-real-time. Edge computers become both sensors and actuators in a closed-loop system.
Hardware Requirements for Underground Deployment
Mining environments impose some of the harshest conditions in industrial computing. Dust concentrations exceed 10 mg/m³, ambient temperatures swing from near-freezing to above 55°C depending on depth, and vehicles generate sustained vibration at 0.5–2G RMS. Standard IT equipment fails within weeks.
The Nuvo-9160GC addresses these constraints with a fanless design that eliminates the primary failure point in dusty environments, MIL-STD-810G shock and vibration certification, and support for NVIDIA RTX-class GPUs that deliver 200+ TOPS for on-vehicle inference. Its wide-range 8–48 VDC power input handles the voltage spikes common during heavy equipment operation.
What Mining Operators Should Watch
The convergence of stricter safety regulation, autonomous vehicle economics, and predictive maintenance ROI makes mining one of the fastest-growing verticals for edge AI between 2026 and 2030. Operations that deploy ruggedized GPU computing underground today are building the infrastructure for full autonomous extraction tomorrow.
For technical specifications and deployment guidance, visit Neteon's rugged GPU computing catalog.
FAQs
Why can't mining operations rely on cloud-based AI?
Underground mines have limited or no connectivity to surface networks. Wi-Fi mesh degrades in dusty, vibration-heavy tunnels. Edge AI processes sensor data locally with sub-10ms latency, eliminating the 200-400ms round-trip delay of cloud processing and meeting real-time safety requirements.
What environmental conditions must edge computers survive underground?
Dust concentrations above 10 mg/m³, temperatures from -25°C to 70°C, sustained vibration at 0.5-2G RMS, and power input fluctuations of 8-48 VDC during heavy equipment engine starts. Fanless designs with MIL-STD-810G certification, like the Nuvo-9160GC, are purpose-built for these conditions.
What ROI timeline should mining operators expect?
Safety-first deployments at ventilation junctions typically pay back within 12 months through regulatory compliance and reduced incident costs. Autonomous haulage and predictive maintenance deployments show ROI within 18-24 months as unplanned shutdown frequency drops by up to 85%.
How does edge AI enable autonomous haul trucks in GPS-denied environments?
Each truck processes LiDAR, radar, and camera feeds locally using GPU-accelerated inference. The Nuvo-9160GC delivers 200+ TOPS for real-time sensor fusion and path planning, allowing navigation without GPS or reliable Wi-Fi connectivity.
What is the digital twin integration roadmap for mining?
By 2029-2030, distributed edge nodes underground will feed real-time operational data to surface-level digital twin platforms. Mine planners can simulate extraction sequences, ventilation changes, and equipment routing in near-real-time, turning edge computers into both sensors and actuators in a closed-loop system.




