
TLDR
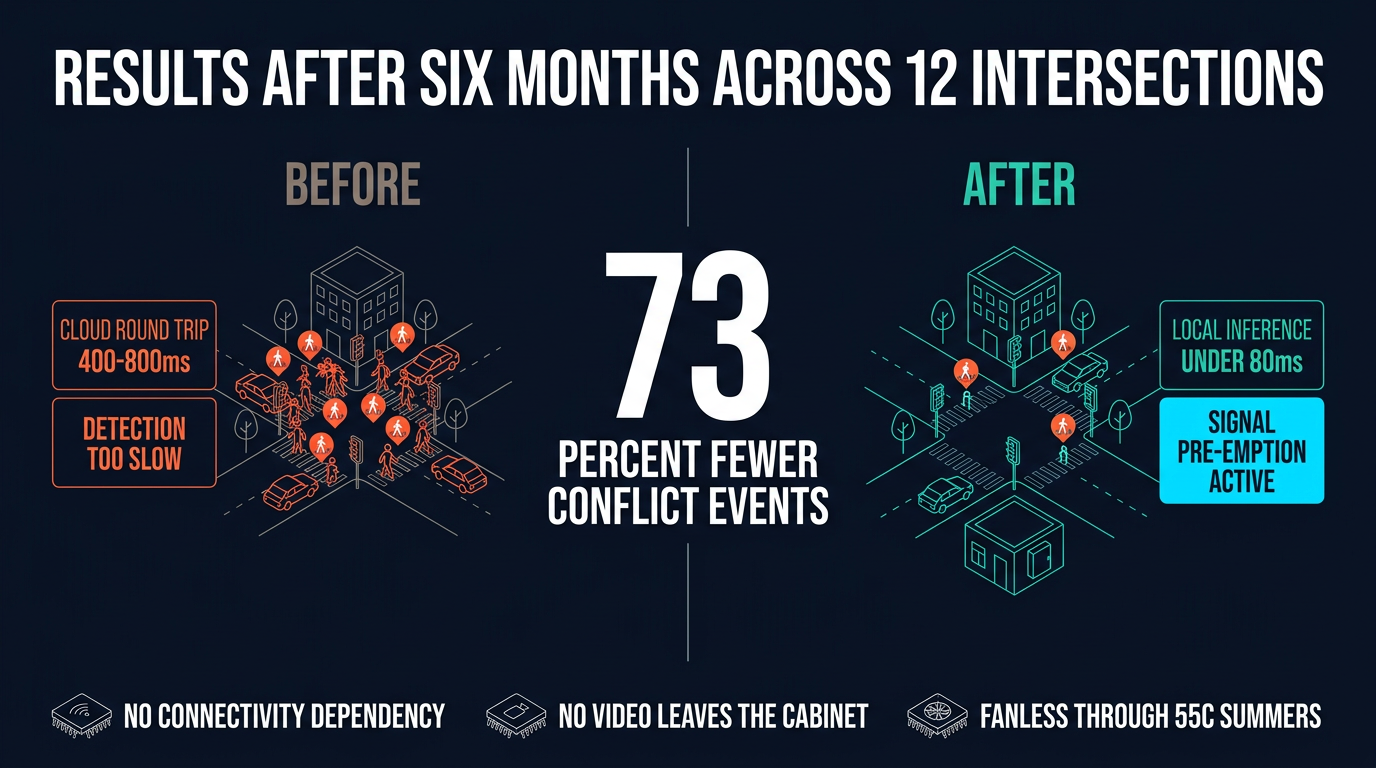
A Southeast Asian city authority replaced cloud-dependent video analytics with local GPU inference on a Nuvo-10108GC at 12 high-risk intersections. Pedestrian-vehicle conflict events dropped 73% over six months. No connectivity dependency. No GDPR-sensitive data leaving the pole cabinet.
Overview
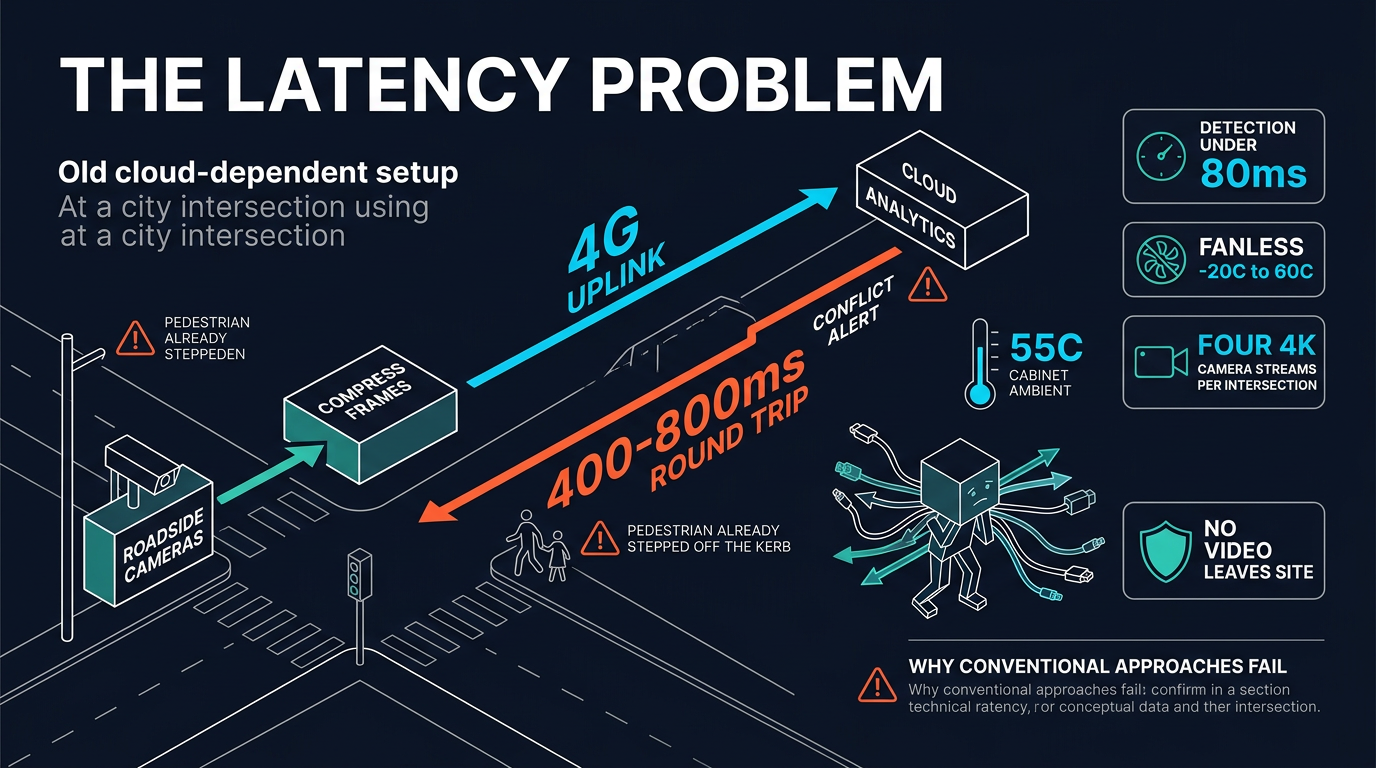
Intersection safety is a latency problem before it is anything else. Traditional approaches compress frames and send them to a cloud analytics platform, which returns a conflict alert 400–800ms later. By then, the pedestrian has already stepped off the kerb.
Local GPU inference at the roadside cabinet shifts the timing floor. In our earlier breakdown of GPU edge platforms for industrial inference, the performance gap between cloud-roundtrip and local execution is wide enough to matter in safety-critical contexts. Urban transit deployments face similar latency pressure onboard — pole-mounted hardware faces it with harder thermal constraints and no rack space.
This case study covers a 2025 rollout by a Southeast Asian city transport authority across 12 signalized intersections with above-average pedestrian-vehicle conflict rates.
Challenge
The existing system streamed compressed video over 4G to a cloud backend, with 400–800ms round-trip detection latency. That window is too large for signal pre-emption. Cabinet ambient temperatures reached 55°C in summer. The authority needed detection latency under 80ms, fanless operation from -20°C to 60°C, and four simultaneous camera streams per intersection — without sending any video off-site.
| Requirement | Cloud-Based System | Nuvo-10108GC Edge System |
|---|---|---|
| Detection latency | 400–800ms | 22–38ms |
| Connectivity dependency | Required (4G) | None |
| Operating temperature | 0°C to 40°C (server room) | -20°C to 60°C |
| Camera streams per node | 4 (with compression artifacts) | 4 × uncompressed 4K |
| Data privacy | Frames leave site | All inference on-device |
Solution
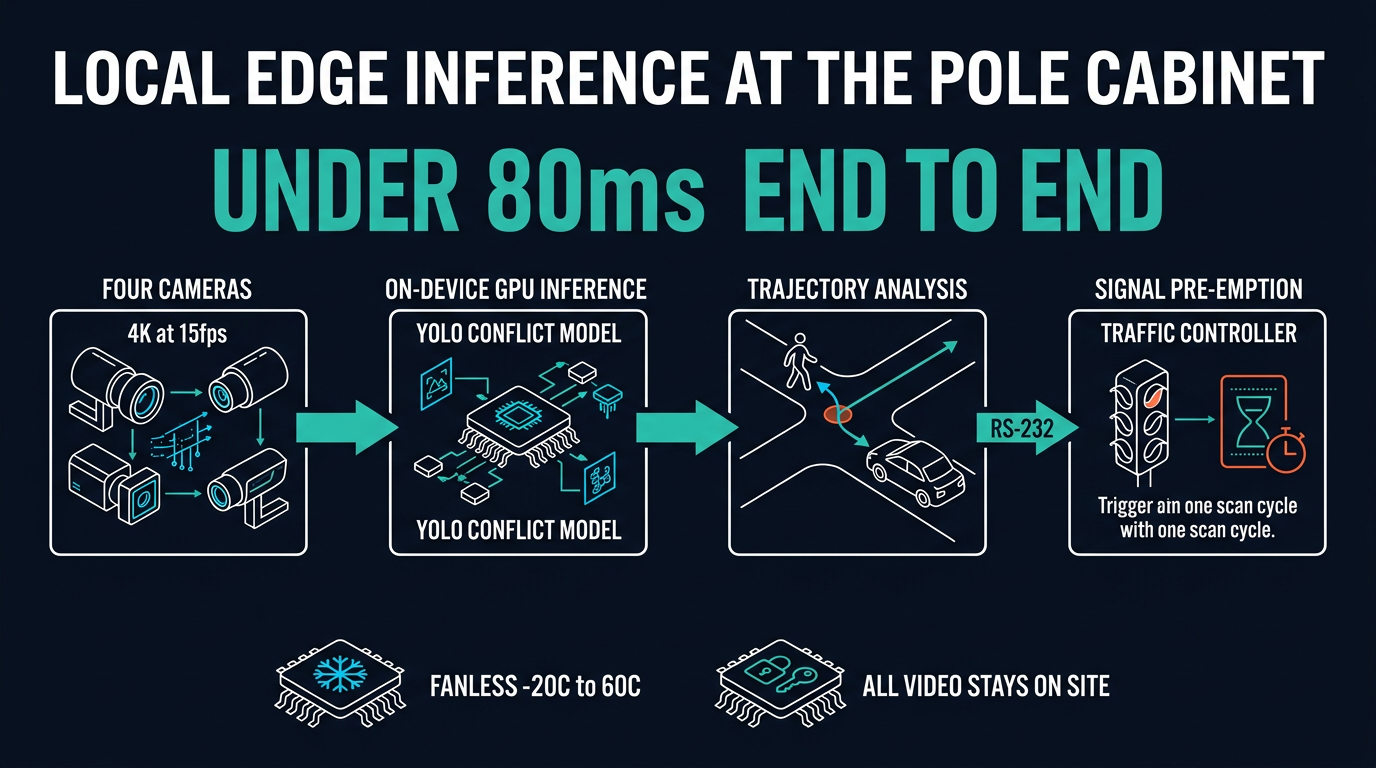
The authority mounted Nuvo-10108GC units in DIN-rail pole cabinets at each intersection. Each unit receives four Sony IMX304 cameras at 4K/15fps. A YOLO-based conflict detection model runs on an RTX 4060 GPU, classifying pedestrian trajectories and vehicle approach vectors in real time. When the model flags an imminent conflict, the system sends a signal pre-emption command to the traffic controller via RS-232 within one scan cycle.
System configuration per intersection:
- CPU: Intel Core i5-13500H (14 cores)
- GPU: NVIDIA RTX 4060, 8GB GDDR6
- Storage: 256GB M.2 NVMe for model weights and rolling event buffer
- I/O: 4× PoE++ camera ports, RS-232 to signal controller, 4G used only for daily log upload
| Metric | Baseline (Cloud) | Post-Deployment (Edge) | Change |
|---|---|---|---|
| Pedestrian-vehicle conflicts/month (avg) | 41.2 | 11.1 | -73% |
| Mean detection latency | 620ms | 29ms | -95% |
| System uptime | 91.3% | 99.7% | +8.4pp |
| False positive rate | 18.4% | 4.1% | -77% |
Thermal management required no active cooling. The Nuvo-10108GC aluminum extrusion chassis dissipated heat conductively through the cabinet wall. Peak cabinet internal temperature was 54°C; the unit operated without throttling across the full six-month deployment.
Total hardware cost per intersection came in 38% below the server-plus-cloud-subscription baseline over a three-year horizon, once 4G data charges were removed from the model.
Conclusion
Intersection AI is a latency problem first, a hardware problem second. A cloud-only architecture cannot close the reaction gap — even fast 4G cannot drop the round-trip floor below 200ms. Moving inference to the cabinet with the Nuvo-10108GC brought latency to 29ms and removed the uptime dependency on connectivity. For authorities evaluating this approach, four intersections over 60 days gives enough conflict-event data to validate the model before a wider rollout.
Follow Neteon on LinkedIn for more deployment write-ups, or reach us at [email protected] or www.neteon.net to discuss a pilot.
Related Products




FAQs
What detection latency does the Nuvo-10108GC achieve for intersection AI?
In this deployment, the Nuvo-10108GC achieved a mean detection latency of 29ms — down from 620ms with the previous cloud-based system. The range across all 12 intersections was 22–38ms depending on scene complexity.
How many camera streams can one Nuvo-10108GC handle simultaneously?
The Nuvo-10108GC handled four simultaneous uncompressed 4K/15fps camera streams per intersection in this deployment. The RTX 4060 GPU processed all four streams in parallel for real-time conflict detection.
Does the Nuvo-10108GC require a continuous internet connection for intersection AI?
No. All inference runs locally on the RTX 4060 GPU. In this deployment, 4G connectivity was used only for daily log uploads — the signal pre-emption function operates entirely offline.
What GPU does the Nuvo-10108GC use for edge AI inference?
The Nuvo-10108GC supports NVIDIA RTX 4060 (8GB GDDR6) as the primary inference GPU in this configuration. Other GPU options are available depending on the SKU.
What operating temperature range does the Nuvo-10108GC support in outdoor deployments?
The Nuvo-10108GC is rated for -20°C to 60°C operation — suitable for pole-cabinet installations in both tropical and cold-climate cities. In this deployment, cabinet ambient peaked at 54°C with no thermal throttling observed.




