
TL;DR
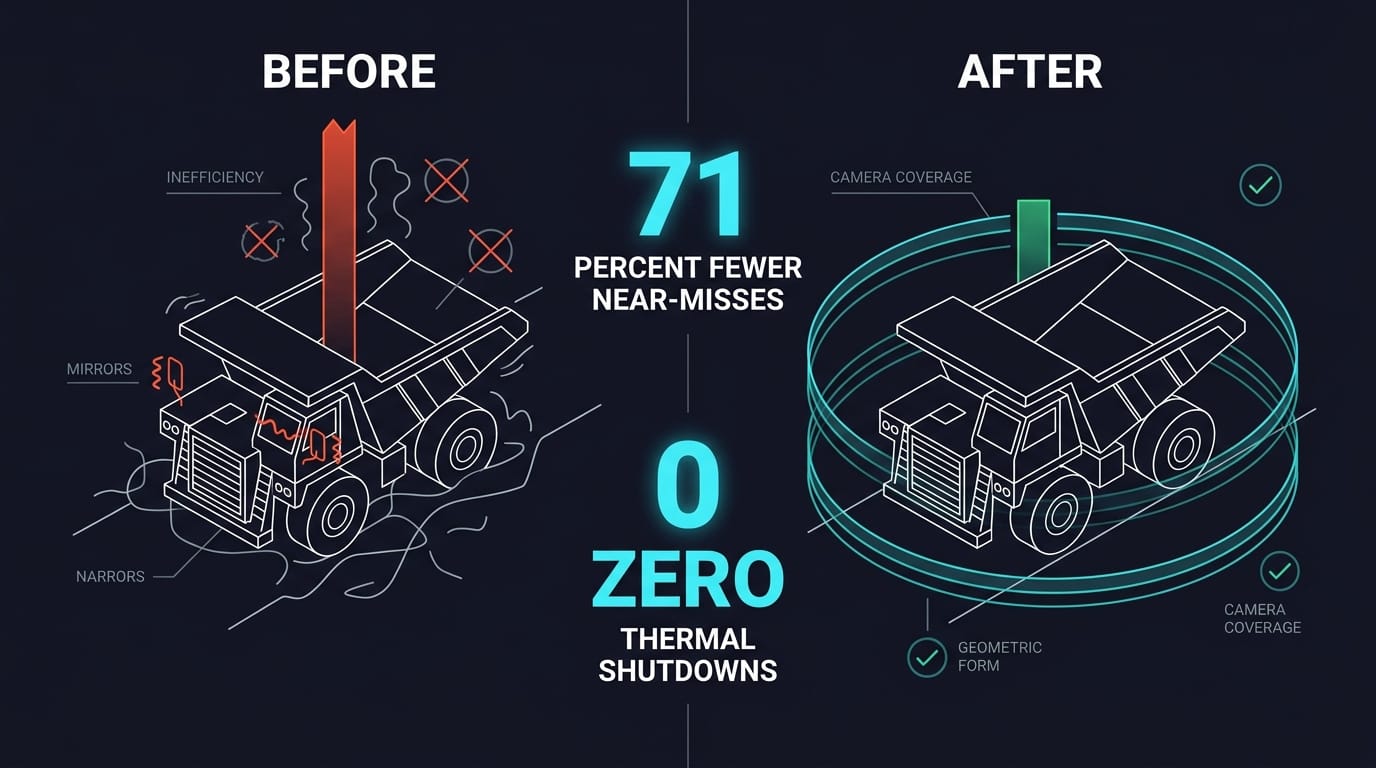
Modeled assumption — A surface copper mine ran 90-tonne haul trucks with factory mirrors and one rear camera. Operators still lost sight of light vehicles and ground crew in the blind zones around the tray and front bumper. The site fitted each truck with six cameras feeding an NRU-220 running 360-degree object detection at the edge. Over six months, logged near-miss events in the loading and dump zones dropped 71%, and the fleet ran through -10C nights and 55C cab-roof heat with zero thermal shutdowns.
For the wider picture across the sector, read our outlook on edge AI in construction and heavy equipment.
Editorial note: This article is an illustrative reference architecture based on public hardware capabilities and common industrial requirements. Percentages and deployment results are modeled assumptions, not verified customer outcomes or performance guarantees. Validate targets with a site-specific pilot.
Overview
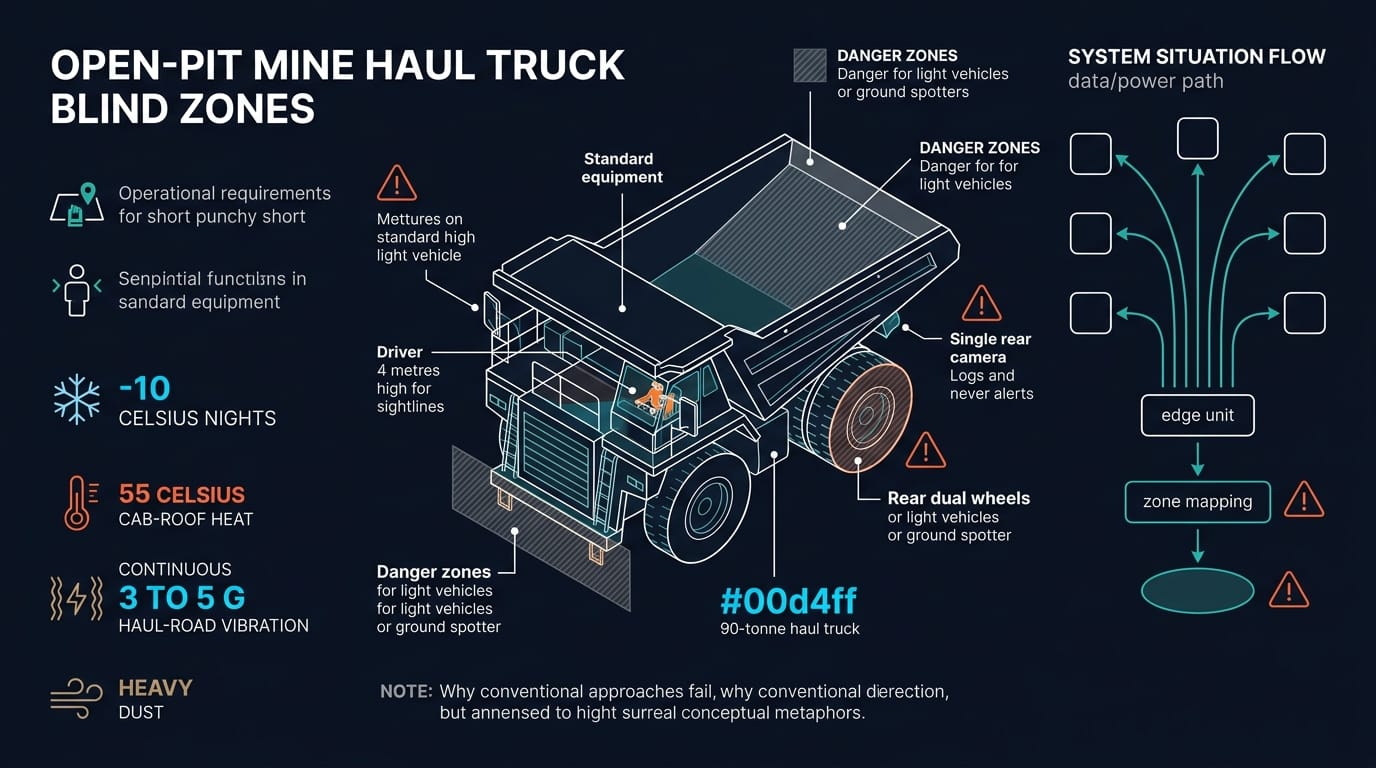
An open-pit haul truck has blind spots a pickup can vanish into. A driver sitting four metres up cannot see a light vehicle off the right-front fender or a spotter near the rear duals. Mirrors and a reversing camera help, but they ask the operator to scan several views during the exact seconds the truck is turning into a loading face or backing toward a dump edge.
This is a compute problem as much as a camera problem, a point we made in our underground mining buyer's guide and our NVH and vibration design guide. The multi-camera approach that cut apron incidents in our airport ground-vehicle case study carries over to a mine, just with harder shock, dust, and temperature limits.
The challenge
The mine's setup logged incidents but did nothing in the moment. Each truck had one rear camera and a cab monitor. No detection, no alert, and nothing tied to where the hazard actually sat around the vehicle.
| Factor | Mirrors + single rear camera | Target: 360-degree edge detection |
|---|---|---|
| Blind-zone coverage | Rear only | Full perimeter, 6 cameras |
| Hazard alert | None, operator judgment | Audible plus zone cue under 200 ms |
| Night and glare | Poor | IR-assisted, consistent |
| Incident record | Manual report | Auto-logged clip and zone |
A laptop-class box could not take the duty. Cab-roof temperature swung from below freezing to roughly 55C, and the trucks pound out continuous 3 to 5 g vibration on the haul road.
The solution
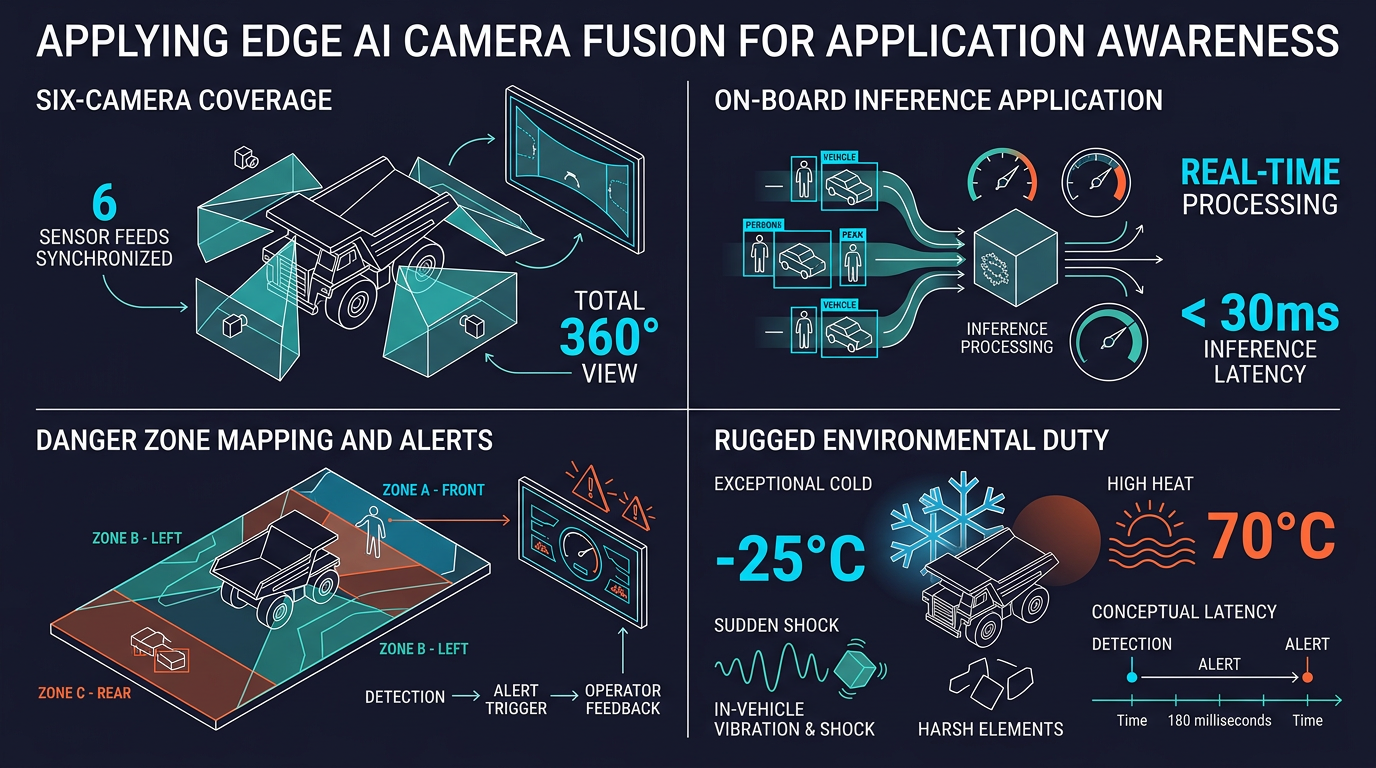
Each truck got six PoE cameras (front, rear, two sides, two corners) wired straight into an NRU-220. The NVIDIA Jetson AGX Orin module runs a person-and-vehicle model across all six feeds and maps each detection to a zone around the truck. When something enters a danger zone, the operator hears a tone and sees which side it came from before reaching for a mirror.
The hardware kept the install simple. The NRU-220 powers all six cameras over its four PoE+ ports, takes the truck's 24 V through an 8 to 48 V input with ignition control so it boots and shuts down with the key, and holds a -25C to 70C rating with no fan to pack with dust. Trucks that need a lighter in-cab telematics unit beside the perception box use a POC-700. Sites standardising on Intel with an onboard NPU instead of Jetson run the same pipeline on a Nuvo-11531.
| Metric | Before | After 6 months |
|---|---|---|
| Logged near-miss events / month | 38 | 11 |
| Reduction | -- | 71% |
| Detection latency | n/a | ~180 ms |
| Thermal shutdowns | n/a | 0 |
| Camera uptime | n/a | 99.4% |
Modeled assumption — The 71% drop came from the load and dump zones, where light vehicles and spotters work closest to the trucks. Operators said they trusted the side cue more than mirrors at night, which is when the older incidents clustered.
Related Products
Modeled assumption — not a verified customer result.




Conclusion
What made this work was the hardware choice. A rugged box that watches six cameras at once and survives the haul road means the alert lands in the second that matters. Follow Neteon on LinkedIn for more edge AI deep dives, contact [email protected], or visit www.neteon.net for datasheets and to scope a haul-truck perception pilot.
FAQs
Why run edge AI on the truck instead of a cloud-connected camera system?
Haul-truck alerts have to fire in well under a second, and pit connectivity is patchy. Running detection on an onboard NRU-220 keeps inference local, so the operator gets a zone cue in roughly 180 ms with no dependence on a network link.
How many cameras can one NRU-220 drive?
The NRU-220 supplies four IEEE 802.3at PoE+ ports directly, so a six-camera 360-degree setup can run on a single unit. Two ports come off a small PoE injector or the remaining USB inputs, keeping the install to one box per truck.
Will the computer survive haul-road vibration and temperature?
The NRU-220 is fanless, rated -25C to 70C, and built for in-vehicle shock and vibration. In this deployment it logged zero thermal shutdowns across -10C nights and 55C cab-roof heat.
How does the system power on and off with the truck?
It takes an 8 to 48 V wide-range DC input with built-in ignition power control, so it boots and shuts down cleanly with the key instead of draining the battery or corrupting storage.
Can we run the same pipeline on Intel hardware instead of Jetson?
Yes. A Nuvo-11531 with an onboard NPU, or a GPU-equipped Nuvo-10108GC, can run an equivalent multi-camera pipeline if you prefer an x86 platform over NVIDIA Jetson.
Sources and further reading
Neousys NRU-220S product specifications.
MSHA proximity detection systems guidance.
Related Neteon guides
NRU-220 Airport Ground Vehicle Safety Architecture.
Nuvo-10108GC Smart Intersection Vision Architecture.
Browse the case study topic hub for more deployment guidance.




