
TLDR
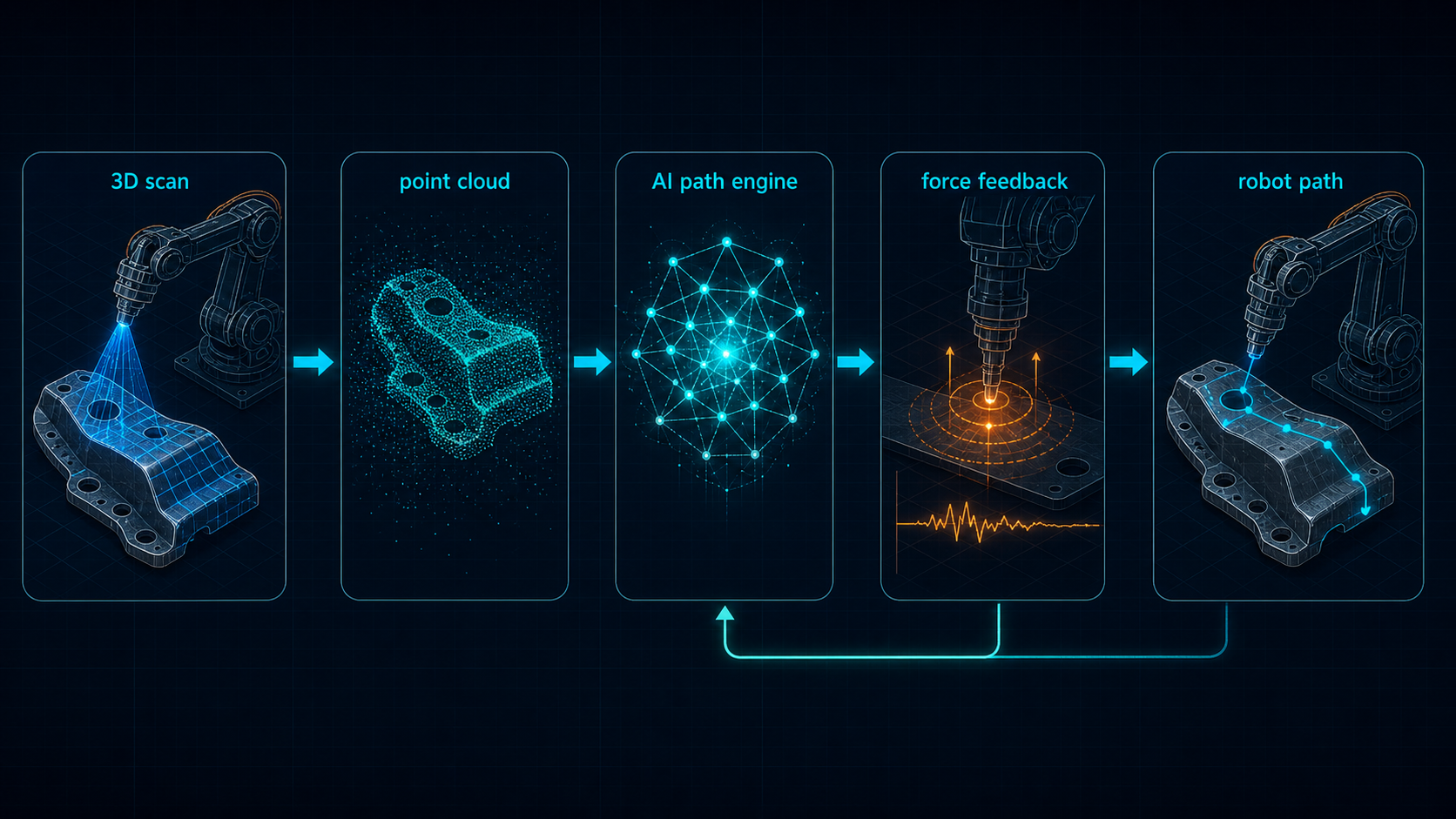
A robotic finishing cell can lose hours to point teaching, offline simulation, and re-teaching every time the part geometry changes. Neousys' public Holon Robotics reference shows a better pattern: scan the workpiece in 3D, generate the robot path from point-cloud data, and run the adaptive path engine at the cell. The result was up to 85% less robot path generation time, with sub-millimeter positioning accuracy. For Neteon's channel, Nuvo-11531 is the compact fit; Nuvo-11000 is the larger I/O and expansion option.
Overview
Robotic polishing, grinding, welding, and spraying all hit the same bottleneck: the tool path is harder than the motion. Traditional point teaching works when every part is identical. It falls apart when a casting, weldment, or surface finish target changes by a few millimeters.
This case study rewrites Neousys' public Holon Robotics 3D scan path-planning deployment for Neteon's engineering audience. For background, see our machine vision system design guide, our Intel vs AMD vs Jetson edge AI platform comparison, and our AI model lifecycle guide for edge deployments.
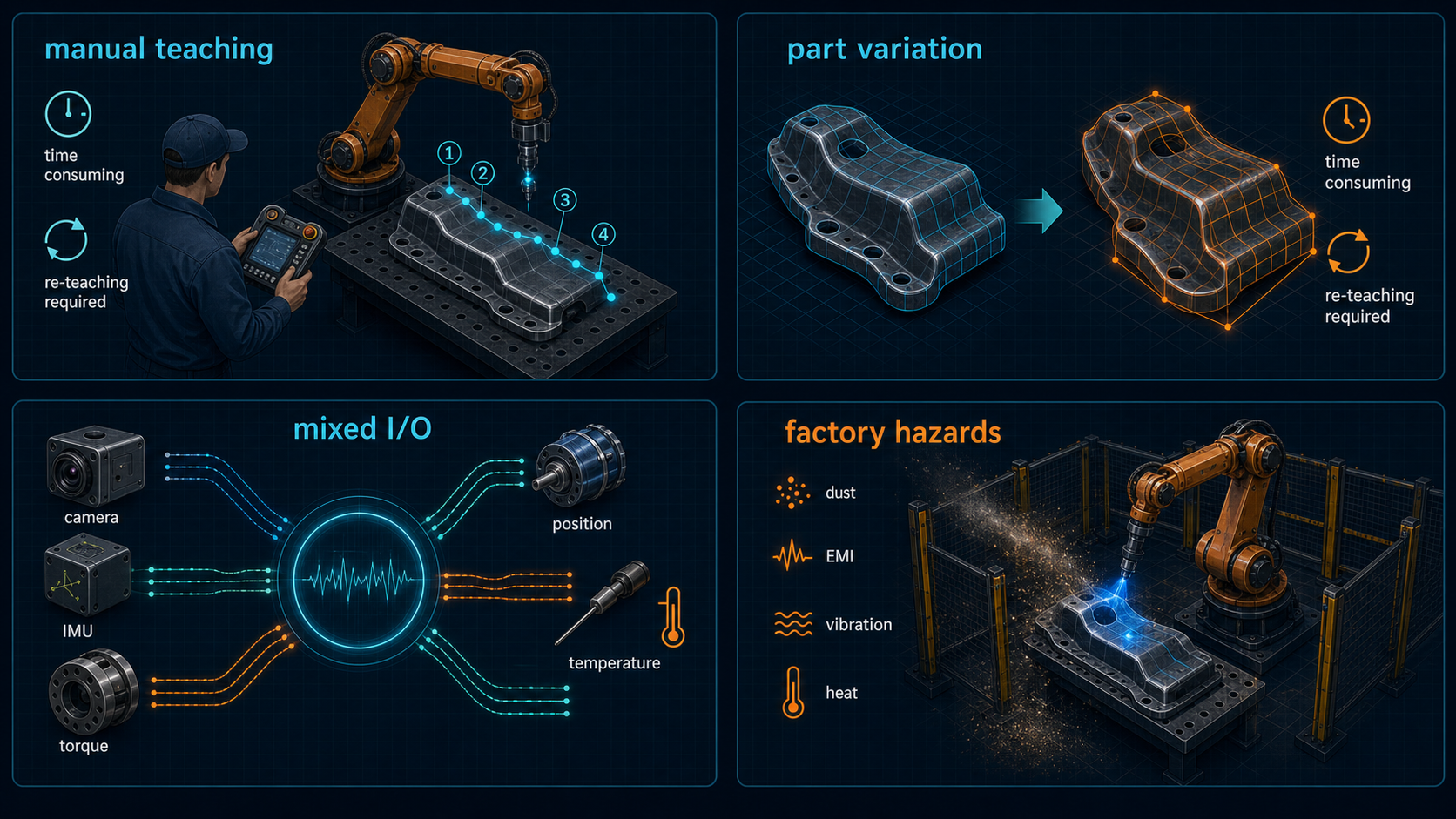
Challenge: path planning becomes an I/O problem
Holon Robotics' arm uses 3D vision input to turn scanned geometry into an adaptive path. That sounds like a software problem until the cell is running. The computer has to collect camera data, sensor feedback, and actuator state at the same time, then feed the robot controller without breaking the control loop.
| Requirement | What breaks in a conventional setup | Edge computer requirement |
|---|---|---|
| 3D workpiece scan | Sequential pattern capture adds motion artifacts | High-bandwidth camera ingest |
| Dynamic path planning | Offline simulation cannot follow part variation | Low-latency AI inference near the arm |
| Force and position feedback | Sensors arrive on mixed interfaces | USB 3.0, GigE, CAN, and serial support |
| Factory-floor uptime | Dust, vibration, EMI, and heat degrade PCs | Fanless rugged chassis and wide-temp design |
| Workpiece changeover | Manual re-teaching consumes skilled labor | Automated path generation from point-cloud data |
The hard part is not one camera or one model. It is the combination: vision, IMU, torque, position, and temperature signals all arriving while the robot is still moving.
Solution: run the adaptive engine at the robot cell
The Neousys reference design places a Nuvo series rugged computer beside the robot cell. For a compact Neteon bill of materials, Nuvo-11531 is the first fit because it pairs Intel Core Ultra 200-class CPU performance with an on-chip NPU for local inference and compact fanless packaging. Where the cell needs more PCIe expansion or a larger I/O envelope, Nuvo-11000 is the next step up.
| Workload | Edge hardware role | Why it matters |
|---|---|---|
| Point-cloud preprocessing | CPU plus memory bandwidth | Cleans the 3D scan before path generation |
| Dynamic tracking | Low-latency inference | Keeps the robot path tied to real geometry |
| Adaptive force control | Mixed sensor I/O | Closes the loop with torque and position data |
| Cell integration | Rugged ports and fanless thermal design | Survives dust, heat, vibration, and EMI |
The public Neousys reference cites Intel Core Ultra 200 processors with a combined 45 TOPS AI compute budget, plus GPU expansion when heavier recognition or multi-sensor fusion is required. That matters in finishing cells because the path engine cannot wait for a server room. The decision has to happen at the arm.
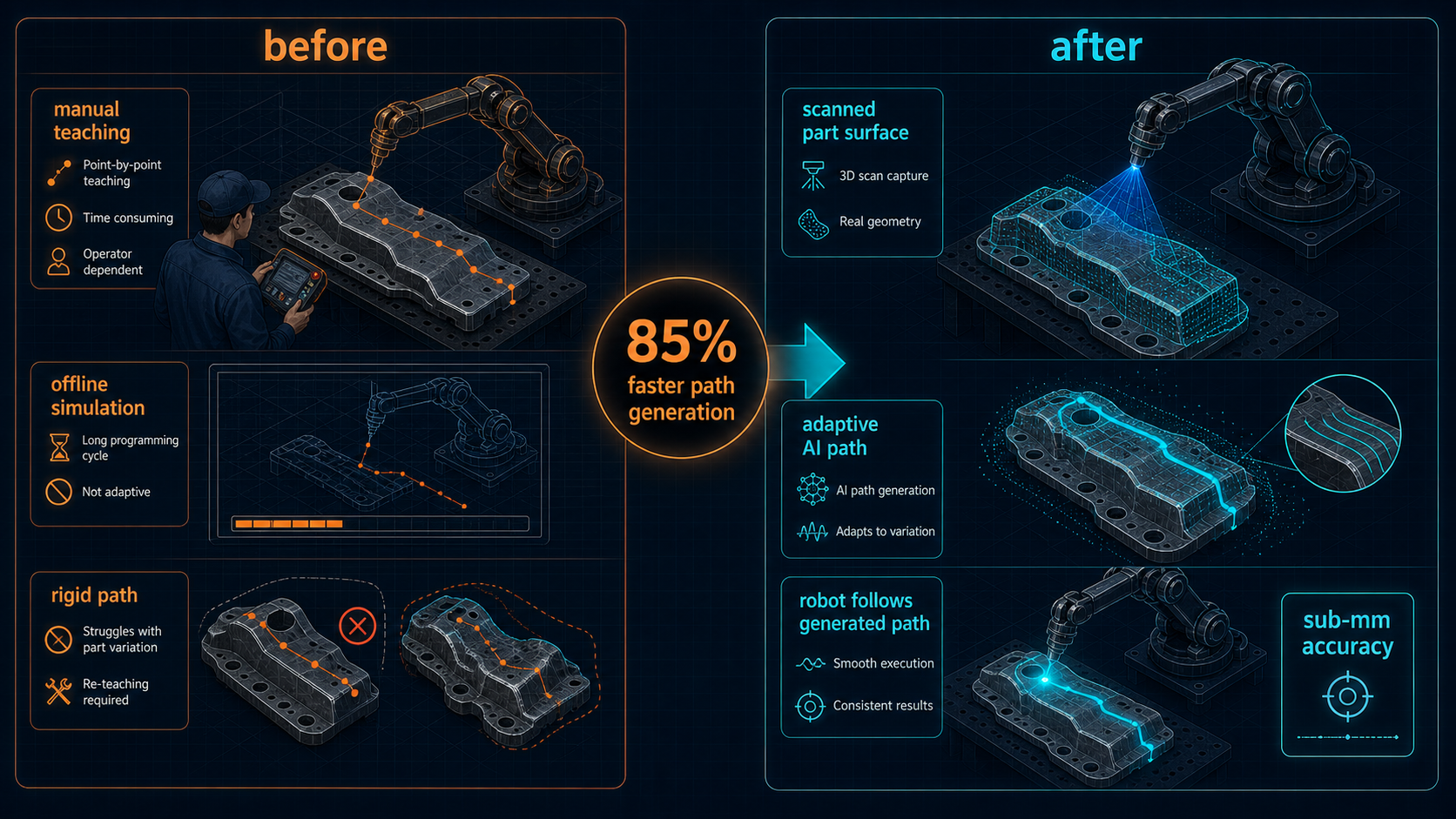
Results: 85% less path generation time
The most useful number from the Holon deployment is path-generation time. Neousys reports up to an 85% reduction versus traditional manual calibration and simulation. The second number is accuracy: the system is described as reaching sub-millimeter positional accuracy while refining trajectories from vision and sensor data.
| KPI | Traditional method | 3D scan edge AI method |
|---|---|---|
| Robot path generation | Manual point teaching and offline programming | Up to 85% faster automated generation |
| Workpiece changeover | Re-teaching required when geometry changes | Path adapts from scanned point-cloud data |
| Positioning accuracy | Operator and fixture dependent | Sub-millimeter target accuracy |
The story is simple but useful. The cell stopped treating robot motion as a fixed script. It started treating the part surface as live geometry.
Related Products




Conclusion
Robot path planning is where factory AI gets practical. If the system can scan the part, infer the surface, and generate a usable path without sending the job back to an offline programmer, the cell changes over faster and keeps skilled labor out of repetitive teaching work. The Nuvo-11531 and Nuvo-11000 families give that path engine a local place to run. Follow Neteon on LinkedIn, contact [email protected], or visit www.neteon.net for datasheets.
FAQs
What problem does this robotic-arm case study solve?
It reduces the manual path teaching and offline programming work normally needed for polishing, grinding, welding, and spraying cells. The robot path is generated from 3D point-cloud data instead of a fixed taught script.
Where does the 85% number come from?
It comes from Neousys' public Holon Robotics reference, which reports up to 85% less robot path generation time compared with traditional manual calibration and simulation.
Why use the Nuvo-11531 for robotic arm path planning?
The Nuvo-11531 is a compact Intel Core Ultra fanless system suited to robot cells that need local AI inference, mixed industrial I/O, and rugged operation near the arm.
When would Nuvo-11000 be a better fit?
Use Nuvo-11000 when the cell needs more I/O headroom, a larger expansion envelope, or additional sensor-fusion capacity beyond a compact cell controller.
Does this architecture require a discrete GPU?
Not always. The public reference points to Core Ultra NPU capability for low-latency inference, with PCIe GPU expansion available when heavier object recognition or multi-sensor fusion requires it.




