TLDR
EtherCAT is a real-time industrial network that runs over ordinary Ethernet cable but moves data differently. One frame passes through every device on the line, and each device reads and writes its slice of that frame as the frame goes by. That trick delivers cycle times under 100 microseconds with sub-microsecond jitter, which is why motion control, robotics, and now edge AI inference loops lean on it. This guide explains what EtherCAT is, how it works, and where it fits in an edge AI build running on hardware like the Nuvo-10000 and Nuvo-11531. For the Siemens-led alternative, see our guide to PROFINET.
For the clock side of real-time Ethernet, see what PTP (IEEE 1588) is and why edge AI needs it.
Overview
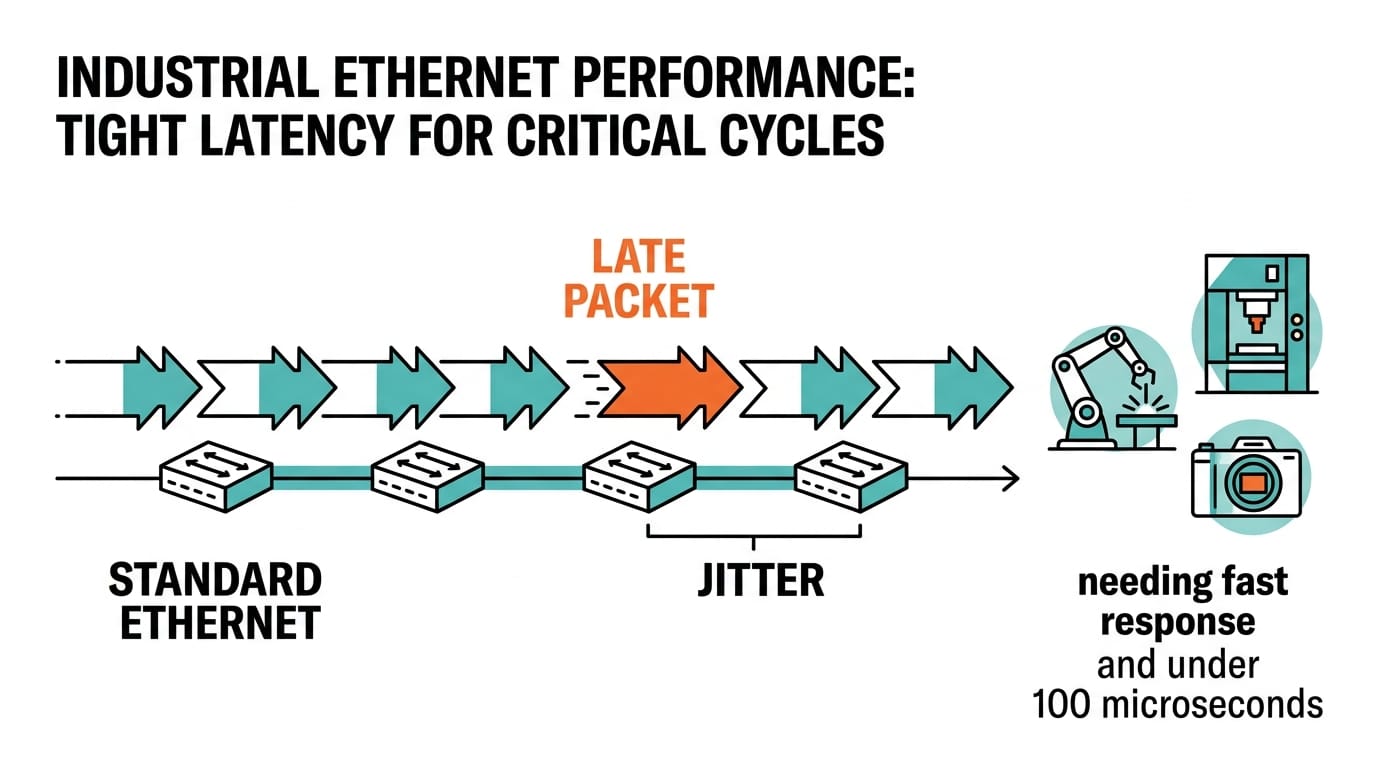
Most factory networks were never built for hard real-time control. Standard Ethernet is quick on average but unpredictable in the worst case, and a late packet during a robot move or a press cycle is a safety problem, not an annoyance. EtherCAT exists to take that uncertainty off the table.
It matters more now because AI has moved onto the plant floor. A vision model that spots a defect is only useful if the reject arm acts on it in time, and that means the inference result has to reach a motion controller on a schedule you can count on. If deterministic networking is new to you, our guide on what is TSN covers the standards-based alternative, and the MQTT vs Modbus TCP comparison shows where slower messaging protocols still earn their place. For the data layer that sits above the control loop, see what is OPC-UA.
Plain-English definition
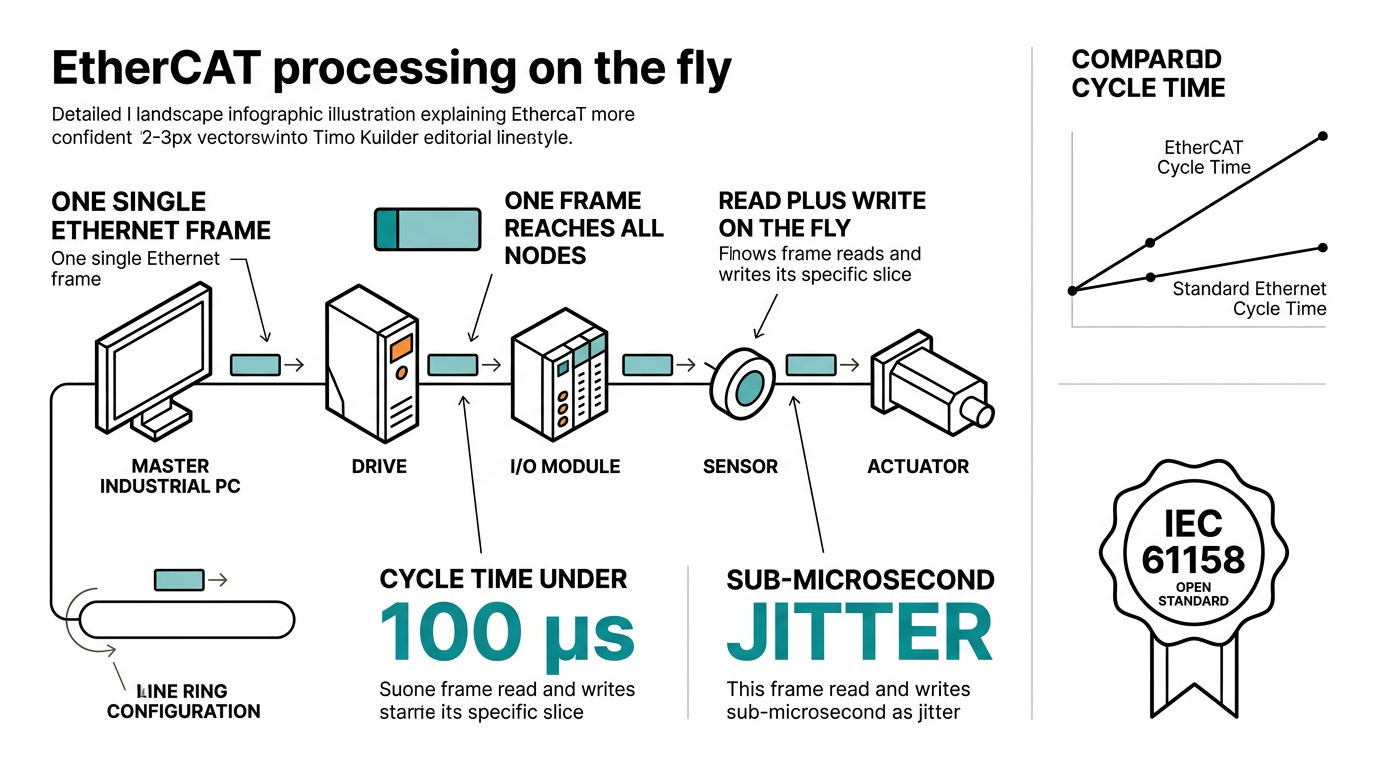
EtherCAT stands for Ethernet for Control Automation Technology. Beckhoff developed it in 2003, and the EtherCAT Technology Group now maintains it as an open standard under IEC 61158. One device is the master, usually an industrial PC, and the rest are slaves: drives, I/O modules, sensors, and actuators wired in a line or a ring.
The real difference from regular Ethernet is what happens to the packet. Switched Ethernet copies a frame into each switch, inspects it, then forwards it. EtherCAT skips that. The master sends a single frame down the line, and each slave handles it in transit, pulling out its inputs and inserting its outputs in the few nanoseconds the frame spends inside its chip. The frame loops back from the last device and returns to the master in one pass.
How it works
| Step | What happens | Why it is fast |
|---|---|---|
| Master sends frame | One Ethernet frame carries data for every slave | No per-device packets to schedule |
| Frame passes each slave | Slave reads its inputs and writes its outputs in transit | Processing happens in hardware, not software |
| Frame returns to master | The updated frame loops back through the line | A full I/O cycle finishes in one round trip |
| Distributed clocks sync | All nodes share a clock with under 1 microsecond skew | Drives and cameras act on the same instant |
A single EtherCAT segment can address up to 65,535 devices and still hold cycle times in the tens of microseconds. Because the switching logic lives inside each slave chip, you do not need managed switches within the segment. That removes a layer of cost and configuration.
Why it matters for edge AI
Edge AI changes what the control network has to carry. You are no longer just polling I/O. You are closing a loop between a model running on a GPU and a machine that has to move, and that loop has two halves with different appetites. Inference wants compute, and the Nuvo-10000 expandable platform gives you PCIe slots for a GPU alongside a port or add-in card for an EtherCAT master. Control wants determinism, which is exactly what EtherCAT delivers.
Running the EtherCAT master in software on the same edge PC that does the inference keeps both halves in one box. The model output and the motion command never leave the machine, so latency stays low and there is no extra gateway to fail. A compact system like the Nuvo-11531 suits cells where space is tight and the camera count is modest, while the Nuvo-10000 fits lines that need more PCIe room. The Nuvo-11000 Core Ultra family is another fit where NPU-assisted inference is the priority.
Real-world examples
In packaging, a vision model flags a misaligned label and an EtherCAT-connected servo nudges the product, all inside one cycle. In a pick-and-place cell, a model estimates grasp points while EtherCAT drives the arm with timing you can trust. In semiconductor handling, distributed clocks keep several motion axes and inspection cameras locked to the same microsecond. The shape is the same every time. AI decides, EtherCAT acts, and the schedule holds.
Related Products



Conclusion
EtherCAT is the quiet workhorse under a lot of real-time automation, and as inference moves to the edge it becomes the link between a model's decision and a machine's response. Pair it with an edge AI platform that can host both the master stack and the inference workload, and the loop stays short and the timing stays honest. Follow Neteon on LinkedIn for more deep dives, or reach us at [email protected] or www.neteon.net to talk through an EtherCAT-based edge AI build.
FAQs
What is EtherCAT in simple terms?
EtherCAT is a real-time industrial network that runs on standard Ethernet cable. A master device sends one frame down a line of slave devices, and each slave reads and writes its own data as the frame passes through, so a full input and output cycle finishes in a single round trip.
How is EtherCAT different from standard Ethernet?
Switched Ethernet copies each frame into a switch, inspects it, and forwards it, which adds delay at every hop. EtherCAT processes the frame on the fly inside each slave chip, so there is no store-and-forward step and timing stays predictable.
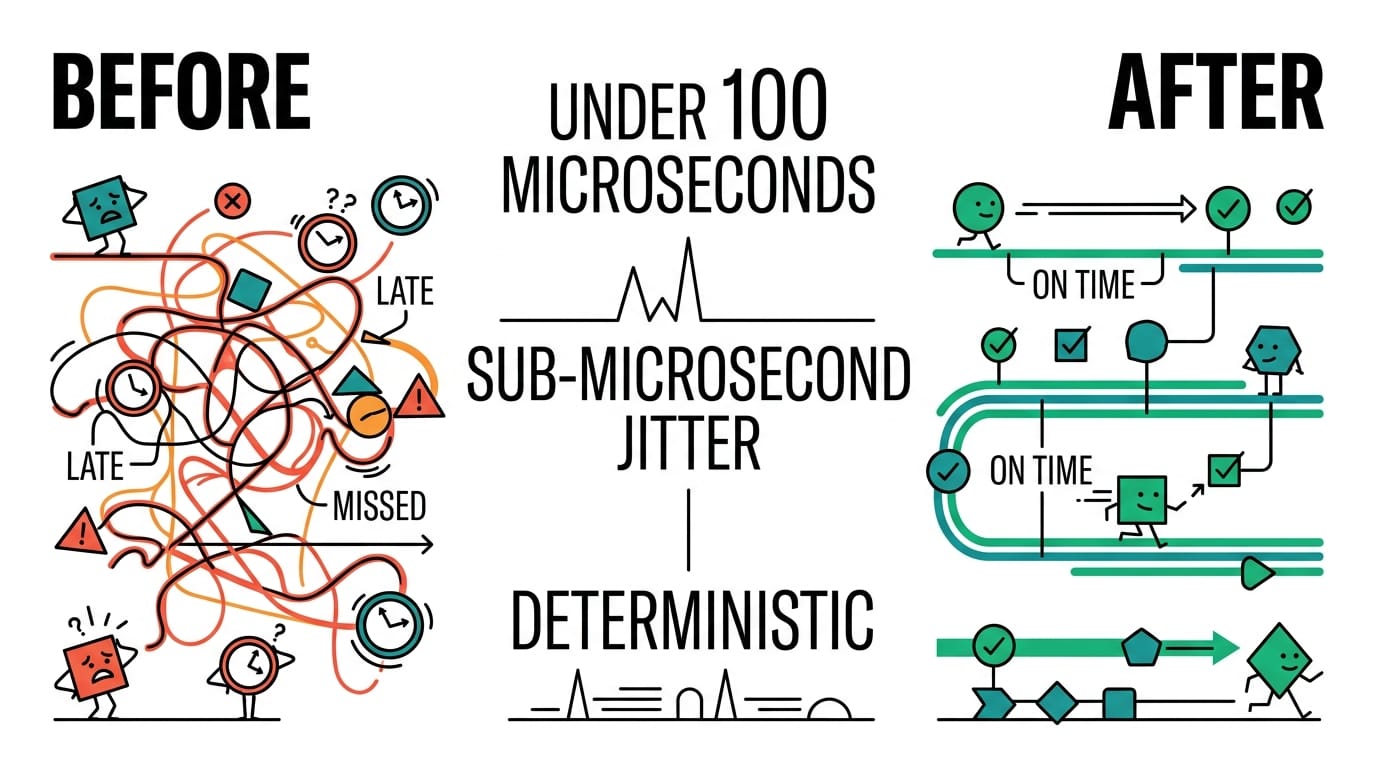
How fast is EtherCAT?
A single segment reaches cycle times under 100 microseconds with jitter below 1 microsecond, and it can address up to 65,535 devices. That determinism is why it is used for motion control, robotics, and tightly timed edge AI loops.
Do I need special switches for EtherCAT?
No. The switching logic is built into each slave device, so you do not need managed switches inside the EtherCAT segment. Standard industrial switches are still used to bridge an EtherCAT cell into the wider OT and IT network.
Can one PC run both AI inference and an EtherCAT master?
Yes. An expandable edge platform such as the Nuvo-10000 can host a GPU for inference and run the EtherCAT master in software, so the model output and the motion command stay on one machine and latency stays low.